#include <algorithm>#include <cassert>#include <chrono>#include <cstdlib>#include <iostream>#include <list>#include <memory>#include <mutex>#include <string>#include <vector>#include "rcl/guard_condition.h"#include "rcl/wait.h"#include "rclcpp/contexts/default_context.hpp"#include "rclcpp/executor_options.hpp"#include "rclcpp/future_return_code.hpp"#include "rclcpp/memory_strategies.hpp"#include "rclcpp/memory_strategy.hpp"#include "rclcpp/node_interfaces/node_base_interface.hpp"#include "rclcpp/utilities.hpp"#include "rclcpp/visibility_control.hpp"#include "rclcpp/scope_exit.hpp"
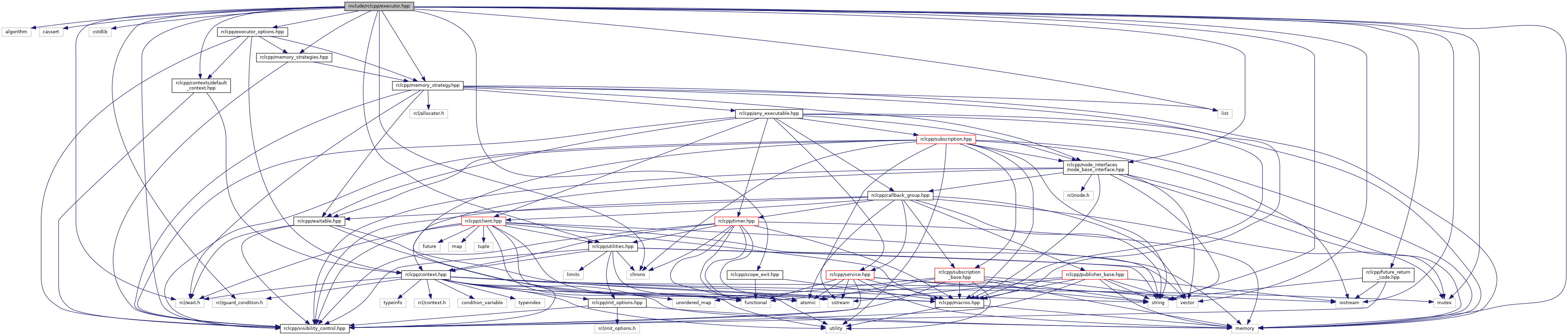
Include dependency graph for executor.hpp:
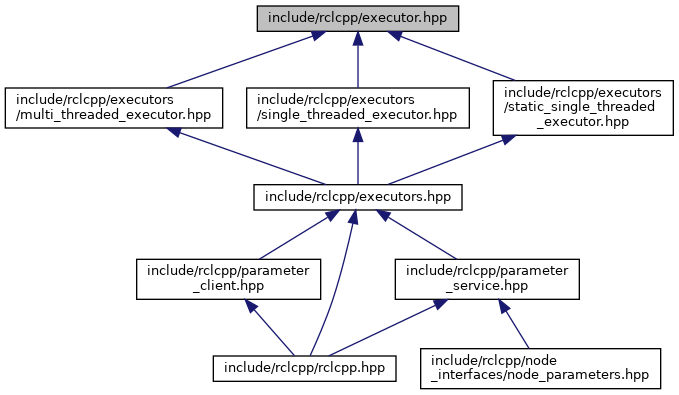
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | rclcpp::Executor |
| Coordinate the order and timing of available communication tasks. More... | |
Namespaces | |
| rclcpp | |
| This header provides the get_node_base_interface() template function. | |
| rclcpp::executor | |
Typedefs | |
| using | rclcpp::executor::Executor = rclcpp::Executor |
