#include <functional>#include <initializer_list>#include <ostream>#include <string>#include <utility>#include <vector>#include "rclcpp/qos.hpp"#include "rclcpp/visibility_control.hpp"#include "rcl_interfaces/msg/set_parameters_result.hpp"#include "rmw/qos_policy_kind.h"
Include dependency graph for qos_overriding_options.hpp:

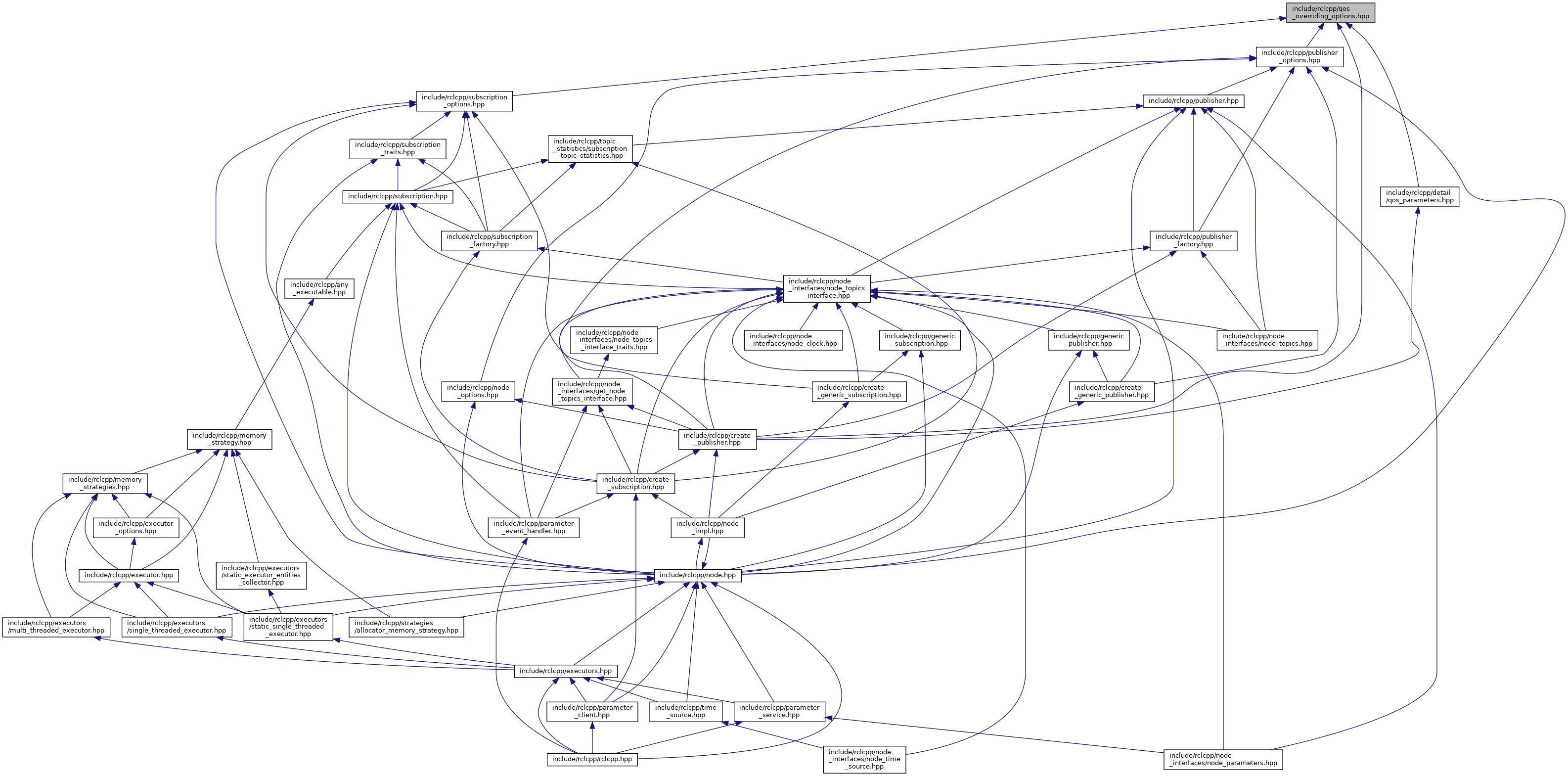
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | rclcpp::detail::QosParameters< T > |
| class | rclcpp::QosOverridingOptions |
| Options that are passed in subscription/publisher constructor to specify QoSConfigurability. More... | |
Namespaces | |
| rclcpp | |
| This header provides the get_node_base_interface() template function. | |
| rclcpp::detail | |
Typedefs | |
| using | rclcpp::QosCallbackResult = rcl_interfaces::msg::SetParametersResult |
| using | rclcpp::QosCallback = std::function< QosCallbackResult(const rclcpp::QoS &)> |
Functions | |
| const char * | rclcpp::qos_policy_kind_to_cstr (const QosPolicyKind &qpk) |
| std::ostream & | rclcpp::operator<< (std::ostream &os, const QosPolicyKind &qpk) |
Variable Documentation
◆ AvoidRosNamespaceConventions
| AvoidRosNamespaceConventions = RMW_QOS_POLICY_AVOID_ROS_NAMESPACE_CONVENTIONS |
◆ Deadline
| Deadline = RMW_QOS_POLICY_DEADLINE |
◆ Depth
| Depth = RMW_QOS_POLICY_DEPTH |
◆ Durability
| Durability = RMW_QOS_POLICY_DURABILITY |
◆ History
| History = RMW_QOS_POLICY_HISTORY |
◆ Lifespan
| Lifespan = RMW_QOS_POLICY_LIFESPAN |
◆ Liveliness
| Liveliness = RMW_QOS_POLICY_LIVELINESS |
◆ LivelinessLeaseDuration
| LivelinessLeaseDuration = RMW_QOS_POLICY_LIVELINESS_LEASE_DURATION |
◆ Reliability
| Reliability = RMW_QOS_POLICY_RELIABILITY |
◆ Invalid
| Invalid = RMW_QOS_POLICY_INVALID |
