#include "rosidl_generator_c/message_type_support_struct.h"#include "rcl/macros.h"#include "rcl/node.h"#include "rcl/visibility_control.h"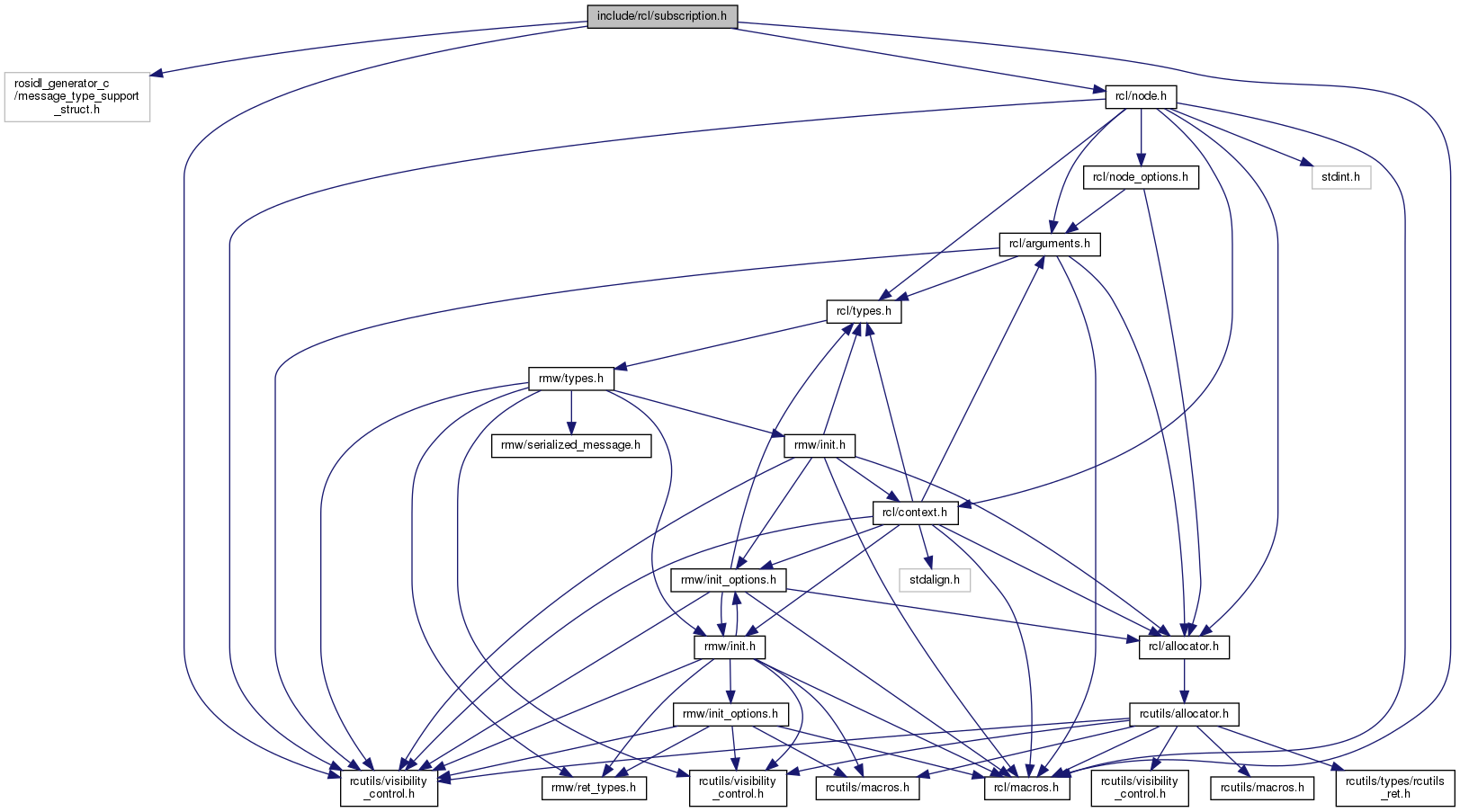
Go to the source code of this file.
Classes | |
| struct | rcl_subscription_t |
| Structure which encapsulates a ROS Subscription. More... | |
| struct | rcl_subscription_options_t |
| Options available for a rcl subscription. More... | |
Typedefs | |
| typedef struct rcl_subscription_t | rcl_subscription_t |
| Structure which encapsulates a ROS Subscription. More... | |
| typedef struct rcl_subscription_options_t | rcl_subscription_options_t |
| Options available for a rcl subscription. More... | |
Functions | |
| rcl_subscription_t | rcl_get_zero_initialized_subscription (void) |
Return a rcl_subscription_t struct with members set to NULL. More... | |
| rcl_ret_t | rcl_subscription_init (rcl_subscription_t *subscription, const rcl_node_t *node, const rosidl_message_type_support_t *type_support, const char *topic_name, const rcl_subscription_options_t *options) |
| Initialize a ROS subscription. More... | |
| rcl_ret_t | rcl_subscription_fini (rcl_subscription_t *subscription, rcl_node_t *node) |
| Finalize a rcl_subscription_t. More... | |
| rcl_subscription_options_t | rcl_subscription_get_default_options (void) |
| Return the default subscription options in a rcl_subscription_options_t. More... | |
| rcl_ret_t | rcl_take (const rcl_subscription_t *subscription, void *ros_message, rmw_message_info_t *message_info, rmw_subscription_allocation_t *allocation) |
| Take a ROS message from a topic using a rcl subscription. More... | |
| rcl_ret_t | rcl_take_serialized_message (const rcl_subscription_t *subscription, rcl_serialized_message_t *serialized_message, rmw_message_info_t *message_info, rmw_subscription_allocation_t *allocation) |
| Take a serialized raw message from a topic using a rcl subscription. More... | |
| const char * | rcl_subscription_get_topic_name (const rcl_subscription_t *subscription) |
| Get the topic name for the subscription. More... | |
| const rcl_subscription_options_t * | rcl_subscription_get_options (const rcl_subscription_t *subscription) |
| Return the rcl subscription options. More... | |
| rmw_subscription_t * | rcl_subscription_get_rmw_handle (const rcl_subscription_t *subscription) |
| Return the rmw subscription handle. More... | |
| bool | rcl_subscription_is_valid (const rcl_subscription_t *subscription) |
| Check that the subscription is valid. More... | |
| rmw_ret_t | rcl_subscription_get_publisher_count (const rcl_subscription_t *subscription, size_t *publisher_count) |
| Get the number of publishers matched to a subscription. More... | |
Typedef Documentation
◆ rcl_subscription_t
| typedef struct rcl_subscription_t rcl_subscription_t |
Structure which encapsulates a ROS Subscription.
◆ rcl_subscription_options_t
| typedef struct rcl_subscription_options_t rcl_subscription_options_t |
Options available for a rcl subscription.
Function Documentation
◆ rcl_get_zero_initialized_subscription()
| rcl_subscription_t rcl_get_zero_initialized_subscription | ( | void | ) |
Return a rcl_subscription_t struct with members set to NULL.
Should be called to get a null rcl_subscription_t before passing to rcl_subscription_init().
◆ rcl_subscription_init()
| rcl_ret_t rcl_subscription_init | ( | rcl_subscription_t * | subscription, |
| const rcl_node_t * | node, | ||
| const rosidl_message_type_support_t * | type_support, | ||
| const char * | topic_name, | ||
| const rcl_subscription_options_t * | options | ||
| ) |
Initialize a ROS subscription.
After calling this function on a rcl_subscription_t, it can be used to take messages of the given type to the given topic using rcl_take().
The given rcl_node_t must be valid and the resulting rcl_subscription_t is only valid as long as the given rcl_node_t remains valid.
The rosidl_message_type_support_t is obtained on a per .msg type basis. When the user defines a ROS message, code is generated which provides the required rosidl_message_type_support_t object. This object can be obtained using a language appropriate mechanism.
- Todo:
- TODO(wjwwood) write these instructions once and link to it instead For C a macro can be used (for example
std_msgs/String):
For C++ a template function is used:
The rosidl_message_type_support_t object contains message type specific information used to publish messages.
The topic name must be a c string which follows the topic and service name format rules for unexpanded names, also known as non-fully qualified names:
- See also
- rcl_expand_topic_name
The options struct allows the user to set the quality of service settings as well as a custom allocator which is used when (de)initializing the subscription to allocate space for incidental things, e.g. the topic name string.
Expected usage (for C messages):
| Attribute | Adherence |
|---|---|
| Allocates Memory | Yes |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[out] subscription preallocated subscription structure [in] node valid rcl node handle [in] type_support type support object for the topic's type [in] topic_name the name of the topic [in] options subscription options, including quality of service settings
- Returns
RCL_RET_OKif subscription was initialized successfully, or-
RCL_RET_INVALID_ARGUMENTif any arguments are invalid, or -
RCL_RET_NODE_INVALIDif the node is invalid, or -
RCL_RET_BAD_ALLOCif allocating memory failed, or -
RCL_RET_TOPIC_NAME_INVALIDif the given topic name is invalid, or -
RCL_RET_ERRORif an unspecified error occurs.
◆ rcl_subscription_fini()
| rcl_ret_t rcl_subscription_fini | ( | rcl_subscription_t * | subscription, |
| rcl_node_t * | node | ||
| ) |
Finalize a rcl_subscription_t.
After calling, the node will no longer be subscribed on this topic (assuming this is the only subscription on this topic in this node).
After calling, calls to rcl_wait and rcl_take will fail when using this subscription. Additioanlly rcl_wait will be interrupted if currently blocking. However, the given node handle is still valid.
| Attribute | Adherence |
|---|---|
| Allocates Memory | Yes |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[in,out] subscription handle to the subscription to be deinitialized [in] node handle to the node used to create the subscription
- Returns
RCL_RET_OKif subscription was deinitialized successfully, or-
RCL_RET_INVALID_ARGUMENTif any arguments are invalid, or -
RCL_RET_SUBSCRIPTION_INVALIDif the subscription is invalid, or -
RCL_RET_NODE_INVALIDif the node is invalid, or -
RCL_RET_ERRORif an unspecified error occurs.
◆ rcl_subscription_get_default_options()
| rcl_subscription_options_t rcl_subscription_get_default_options | ( | void | ) |
Return the default subscription options in a rcl_subscription_options_t.
The defaults are:
- ignore_local_publications = false
- qos = rmw_qos_profile_default
- allocator = rcl_get_default_allocator()
◆ rcl_take()
| rcl_ret_t rcl_take | ( | const rcl_subscription_t * | subscription, |
| void * | ros_message, | ||
| rmw_message_info_t * | message_info, | ||
| rmw_subscription_allocation_t * | allocation | ||
| ) |
Take a ROS message from a topic using a rcl subscription.
It is the job of the caller to ensure that the type of the ros_message argument and the type associate with the subscription, via the type support, match. Passing a different type to rcl_take produces undefined behavior and cannot be checked by this function and therefore no deliberate error will occur.
TODO(wjwwood) blocking of take? TODO(wjwwood) pre-, during-, and post-conditions for message ownership? TODO(wjwwood) is rcl_take thread-safe? TODO(wjwwood) Should there be an rcl_message_info_t?
The ros_message pointer should point to an already allocated ROS message struct of the correct type, into which the taken ROS message will be copied if one is available. If taken is false after calling, then the ROS message will be unmodified.
The taken boolean may be false even if a wait set reports that the subscription was ready to be taken from in some cases, e.g. when the state of the subscription changes it may cause the wait set to wake up but subsequent takes to fail to take anything.
If allocation is required when taking the message, e.g. if space needs to be allocated for a dynamically sized array in the target message, then the allocator given in the subscription options is used.
The rmw message_info struct contains meta information about this particular message instance, like what the GUID of the publisher which published it originally or whether or not the message received from within the same process. The message_info argument should be an already allocated rmw_message_info_t structure. Passing NULL for message_info will result in the argument being ignored.
| Attribute | Adherence |
|---|---|
| Allocates Memory | Maybe [1] |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
[1] only if required when filling the message, avoided for fixed sizes
- Parameters
-
[in] subscription the handle to the subscription from which to take [in,out] ros_message type-erased ptr to a allocated ROS message [out] message_info rmw struct which contains meta-data for the message [in] allocation structure pointer used for memory preallocation (may be NULL)
- Returns
RCL_RET_OKif the message was published, or-
RCL_RET_INVALID_ARGUMENTif any arguments are invalid, or -
RCL_RET_SUBSCRIPTION_INVALIDif the subscription is invalid, or -
RCL_RET_BAD_ALLOCif allocating memory failed, or -
RCL_RET_SUBSCRIPTION_TAKE_FAILEDif take failed but no error occurred in the middleware, or -
RCL_RET_ERRORif an unspecified error occurs.
◆ rcl_take_serialized_message()
| rcl_ret_t rcl_take_serialized_message | ( | const rcl_subscription_t * | subscription, |
| rcl_serialized_message_t * | serialized_message, | ||
| rmw_message_info_t * | message_info, | ||
| rmw_subscription_allocation_t * | allocation | ||
| ) |
Take a serialized raw message from a topic using a rcl subscription.
In contrast to rcl_take, this function stores the taken message in its raw binary representation. It is the job of the caller to ensure that the type associate with the subscription matches, and can optionally be deserialized into its ROS message via, the correct type support. If the serialized_message parameter contains enough preallocated memory, the incoming message can be taken without any additional memory allocation. If not, the function will dynamically allocate enough memory for the message. Passing a different type to rcl_take produces undefined behavior and cannot be checked by this function and therefore no deliberate error will occur.
Apart from the differences above, this function behaves like rcl_take.
| Attribute | Adherence |
|---|---|
| Allocates Memory | Maybe [1] |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
[1] only if storage in the serialized_message is insufficient
- Parameters
-
[in] subscription the handle to the subscription from which to take [in,out] serialized_message pointer to a (pre-allocated) serialized message. [out] message_info rmw struct which contains meta-data for the message [in] allocation structure pointer used for memory preallocation (may be NULL)
- Returns
RCL_RET_OKif the message was published, or-
RCL_RET_INVALID_ARGUMENTif any arguments are invalid, or -
RCL_RET_SUBSCRIPTION_INVALIDif the subscription is invalid, or -
RCL_RET_BAD_ALLOCif allocating memory failed, or -
RCL_RET_SUBSCRIPTION_TAKE_FAILEDif take failed but no error occurred in the middleware, or -
RCL_RET_ERRORif an unspecified error occurs.
◆ rcl_subscription_get_topic_name()
| const char* rcl_subscription_get_topic_name | ( | const rcl_subscription_t * | subscription | ) |
Get the topic name for the subscription.
This function returns the subscription's internal topic name string. This function can fail, and therefore return NULL, if the:
- subscription is
NULL - subscription is invalid (never called init, called fini, or invalid)
The returned string is only valid as long as the subscription is valid. The value of the string may change if the topic name changes, and therefore copying the string is recommended if this is a concern.
| Attribute | Adherence |
|---|---|
| Allocates Memory | No |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[in] subscription the pointer to the subscription
- Returns
- name string if successful, otherwise
NULL
◆ rcl_subscription_get_options()
| const rcl_subscription_options_t* rcl_subscription_get_options | ( | const rcl_subscription_t * | subscription | ) |
Return the rcl subscription options.
This function returns the subscription's internal options struct. This function can fail, and therefore return NULL, if the:
- subscription is
NULL - subscription is invalid (never called init, called fini, or invalid)
The returned struct is only valid as long as the subscription is valid. The values in the struct may change if the subscription's options change, and therefore copying the struct is recommended if this is a concern.
| Attribute | Adherence |
|---|---|
| Allocates Memory | No |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[in] subscription pointer to the subscription
- Returns
- options struct if successful, otherwise
NULL
◆ rcl_subscription_get_rmw_handle()
| rmw_subscription_t* rcl_subscription_get_rmw_handle | ( | const rcl_subscription_t * | subscription | ) |
Return the rmw subscription handle.
The handle returned is a pointer to the internally held rmw handle. This function can fail, and therefore return NULL, if the:
- subscription is
NULL - subscription is invalid (never called init, called fini, or invalid)
The returned handle is made invalid if the subscription is finalized or if rcl_shutdown() is called. The returned handle is not guaranteed to be valid for the life time of the subscription as it may be finalized and recreated itself. Therefore it is recommended to get the handle from the subscription using this function each time it is needed and avoid use of the handle concurrently with functions that might change it.
| Attribute | Adherence |
|---|---|
| Allocates Memory | No |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[in] subscription pointer to the rcl subscription
- Returns
- rmw subscription handle if successful, otherwise
NULL
◆ rcl_subscription_is_valid()
| bool rcl_subscription_is_valid | ( | const rcl_subscription_t * | subscription | ) |
Check that the subscription is valid.
The bool returned is false if subscription is invalid. The bool returned is true otherwise. In the case where false is to be returned, an error message is set. This function cannot fail.
| Attribute | Adherence |
|---|---|
| Allocates Memory | No |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[in] subscription pointer to the rcl subscription
- Returns
trueifsubscriptionis valid, otherwisefalse
◆ rcl_subscription_get_publisher_count()
| rmw_ret_t rcl_subscription_get_publisher_count | ( | const rcl_subscription_t * | subscription, |
| size_t * | publisher_count | ||
| ) |
Get the number of publishers matched to a subscription.
Used to get the internal count of publishers matched to a subscription.
| Attribute | Adherence |
|---|---|
| Allocates Memory | No |
| Thread-Safe | Yes |
| Uses Atomics | Maybe [1] |
| Lock-Free | Maybe [1] |
[1] only if the underlying rmw doesn't make use of this feature
- Parameters
-
[in] subscription pointer to the rcl subscription [out] publisher_count number of matched publishers
- Returns
RCL_RET_OKif the count was retrieved, or-
RCL_RET_INVALID_ARGUMENTif any arguments are invalid, or -
RCL_RET_SUBSCRIPTION_INVALIDif the subscription is invalid, or -
RCL_RET_ERRORif an unspecified error occurs.