Structure which encapsulates the options for creating a rcl_node_t. More...
#include <node_options.h>
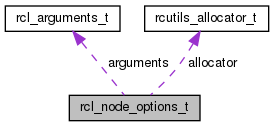
Collaboration diagram for rcl_node_options_t:
Public Attributes | |
| size_t | domain_id |
| If true, no parameter infrastructure will be setup. More... | |
| rcl_allocator_t | allocator |
| Custom allocator used for internal allocations. More... | |
| bool | use_global_arguments |
| If false then only use arguments in this struct, otherwise use global arguments also. More... | |
| rcl_arguments_t | arguments |
| Command line arguments that apply only to this node. More... | |
Detailed Description
Structure which encapsulates the options for creating a rcl_node_t.
Member Data Documentation
◆ domain_id
| size_t rcl_node_options_t::domain_id |
If true, no parameter infrastructure will be setup.
If set, then this value overrides the ROS_DOMAIN_ID environment variable. It defaults to RCL_NODE_OPTIONS_DEFAULT_DOMAIN_ID, which will cause the node to use the ROS domain ID set in the ROS_DOMAIN_ID environment variable, or on some systems 0 if the environment variable is not set.
- Todo:
- TODO(wjwwood): Should we put a limit on the ROS_DOMAIN_ID value, that way we can have a safe value for the default RCL_NODE_OPTIONS_DEFAULT_DOMAIN_ID? (currently max size_t)
◆ allocator
| rcl_allocator_t rcl_node_options_t::allocator |
Custom allocator used for internal allocations.
◆ use_global_arguments
| bool rcl_node_options_t::use_global_arguments |
If false then only use arguments in this struct, otherwise use global arguments also.
◆ arguments
| rcl_arguments_t rcl_node_options_t::arguments |
Command line arguments that apply only to this node.
The documentation for this struct was generated from the following file:
- include/rcl/node_options.h