#include <stdint.h>#include "rcl/allocator.h"#include "rcl/arguments.h"#include "rcl/context.h"#include "rcl/macros.h"#include "rcl/node_options.h"#include "rcl/types.h"#include "rcl/visibility_control.h"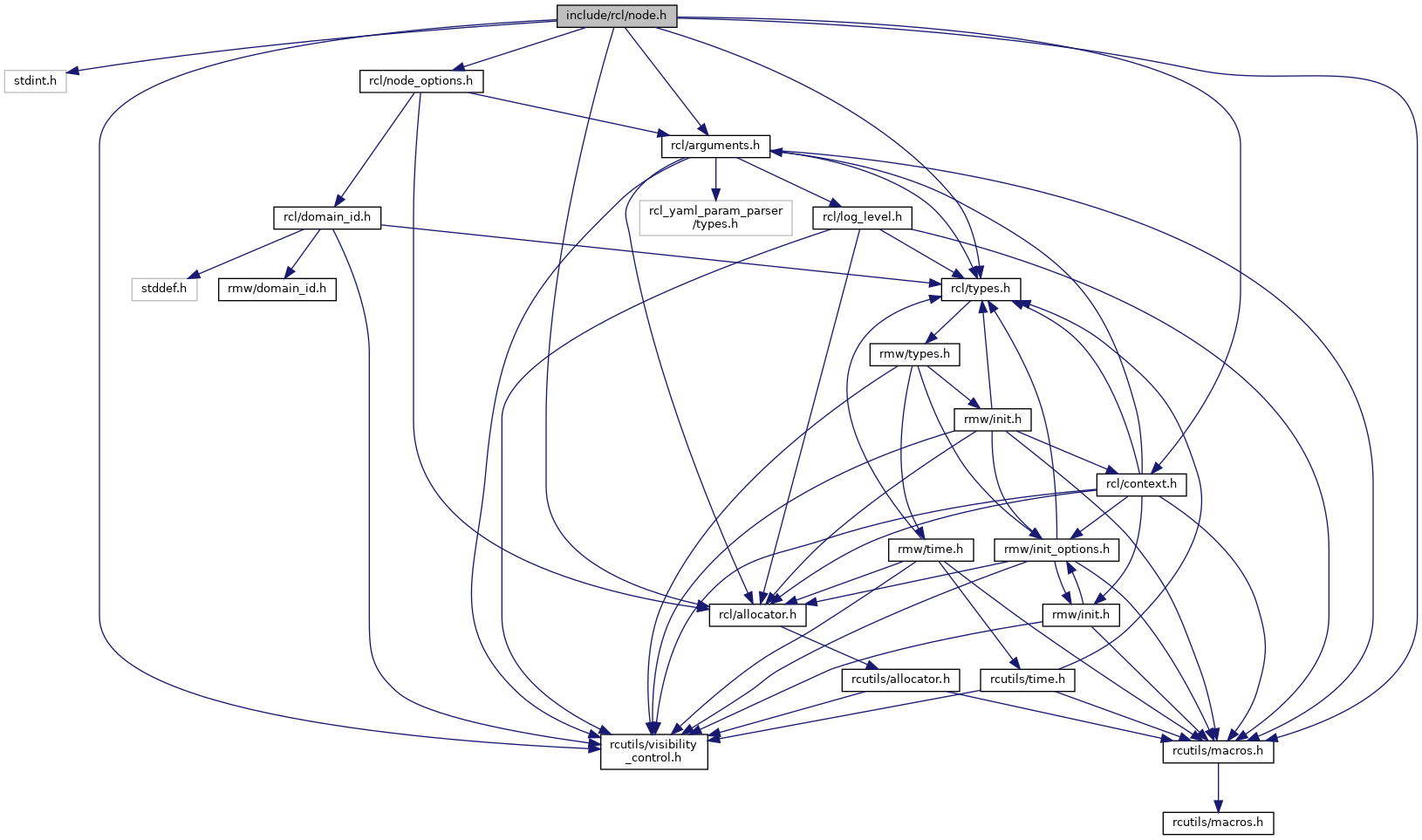
Go to the source code of this file.
Classes | |
| struct | rcl_node_t |
| Structure which encapsulates a ROS Node. More... | |
Typedefs | |
| typedef struct rcl_node_t | rcl_node_t |
| Structure which encapsulates a ROS Node. | |
Functions | |
| rcl_node_t | rcl_get_zero_initialized_node (void) |
Return a rcl_node_t struct with members initialized to NULL. | |
| rcl_ret_t | rcl_node_init (rcl_node_t *node, const char *name, const char *namespace_, rcl_context_t *context, const rcl_node_options_t *options) |
| Initialize a ROS node. More... | |
| rcl_ret_t | rcl_node_fini (rcl_node_t *node) |
| Finalize a rcl_node_t. More... | |
| bool | rcl_node_is_valid (const rcl_node_t *node) |
Return true if the node is valid, else false. More... | |
| bool | rcl_node_is_valid_except_context (const rcl_node_t *node) |
| Return true if node is valid, except for the context being valid. More... | |
| const char * | rcl_node_get_name (const rcl_node_t *node) |
| Return the name of the node. More... | |
| const char * | rcl_node_get_namespace (const rcl_node_t *node) |
| Return the namespace of the node. More... | |
| const char * | rcl_node_get_fully_qualified_name (const rcl_node_t *node) |
| Return the fully qualified name of the node. More... | |
| const rcl_node_options_t * | rcl_node_get_options (const rcl_node_t *node) |
| Return the rcl node options. More... | |
| rcl_ret_t | rcl_node_get_domain_id (const rcl_node_t *node, size_t *domain_id) |
| Return the ROS domain ID that the node is using. More... | |
| rmw_node_t * | rcl_node_get_rmw_handle (const rcl_node_t *node) |
| Return the rmw node handle. More... | |
| uint64_t | rcl_node_get_rcl_instance_id (const rcl_node_t *node) |
| Return the associated rcl instance id. More... | |
| const struct rcl_guard_condition_t * | rcl_node_get_graph_guard_condition (const rcl_node_t *node) |
| Return a guard condition which is triggered when the ROS graph changes. More... | |
| const char * | rcl_node_get_logger_name (const rcl_node_t *node) |
| Return the logger name of the node. More... | |
| rcl_ret_t | rcl_node_resolve_name (const rcl_node_t *node, const char *input_name, rcl_allocator_t allocator, bool is_service, bool only_expand, char **output_name) |
| Expand a given name into a fully-qualified topic name and apply remapping rules. More... | |
Function Documentation
◆ rcl_node_init()
| rcl_ret_t rcl_node_init | ( | rcl_node_t * | node, |
| const char * | name, | ||
| const char * | namespace_, | ||
| rcl_context_t * | context, | ||
| const rcl_node_options_t * | options | ||
| ) |
Initialize a ROS node.
Calling this on a rcl_node_t makes it a valid node handle until rcl_shutdown is called or until rcl_node_fini is called on it.
After calling, the ROS node object can be used to create other middleware primitives like publishers, services, parameters, etc.
The name of the node must not be NULL and adhere to naming restrictions, see the rmw_validate_node_name() function for rules.
- Todo:
- TODO(wjwwood): node name uniqueness is not yet enforced
The name of the node cannot coincide with another node of the same name. If a node of the same name is already in the domain, it will be shutdown.
The namespace of the node should not be NULL and should also pass the rmw_validate_namespace() function's rules.
Additionally this function allows namespaces which lack a leading forward slash. Because there is no notion of a relative namespace, there is no difference between a namespace which lacks a forward and the same namespace with a leading forward slash. Therefore, a namespace like "foo/bar" is automatically changed to "/foo/bar" by this function. Similarly, the namespace "" will implicitly become "/" which is a valid namespace.
- Todo:
- TODO(wjwwood): Parameter infrastructure is currently initialized in the language specific client library, e.g. rclcpp for C++, but will be initialized here in the future. When that happens there will be an option to avoid parameter infrastructure with an option in the rcl_node_options_t struct.
A node contains infrastructure for ROS parameters, which include advertising publishers and service servers. This function will create those external parameter interfaces even if parameters are not used later.
The rcl_node_t given must be allocated and zero initialized. Passing an rcl_node_t which has already had this function called on it, more recently than rcl_node_fini, will fail. An allocated rcl_node_t with uninitialized memory is undefined behavior.
Expected usage:
| Attribute | Adherence |
|---|---|
| Allocates Memory | Yes |
| Thread-Safe | No |
| Uses Atomics | Yes |
| Lock-Free | Yes [1] |
[1] if atomic_is_lock_free() returns true for atomic_uint_least64_t
- Precondition
- the node handle must be allocated, zero initialized, and invalid
- the context handle must be allocated, initialized, and valid
- Postcondition
- the node handle is valid and can be used in other
rcl_*functions
- Parameters
-
[in,out] node a preallocated rcl_node_t [in] name the name of the node, must be a valid c-string [in] namespace_ the namespace of the node, must be a valid c-string [in] context the context instance with which the node should be associated [in] options the node options. The options are deep copied into the node. The caller is always responsible for freeing memory used options they pass in.
- Returns
- RCL_RET_OK if the node was initialized successfully, or
- RCL_RET_ALREADY_INIT if the node has already be initialized, or
- RCL_RET_NOT_INIT if the given context is invalid, or
- RCL_RET_INVALID_ARGUMENT if any arguments are invalid, or
- RCL_RET_BAD_ALLOC if allocating memory failed, or
- RCL_RET_NODE_INVALID_NAME if the name is invalid, or
- RCL_RET_NODE_INVALID_NAMESPACE if the namespace_ is invalid, or
- RCL_RET_ERROR if an unspecified error occurs.
◆ rcl_node_fini()
| rcl_ret_t rcl_node_fini | ( | rcl_node_t * | node | ) |
Finalize a rcl_node_t.
Destroys any automatically created infrastructure and deallocates memory. After calling, the rcl_node_t can be safely deallocated.
All middleware primitives created by the user, e.g. publishers, services, etc, which were created from this node must be finalized using their respective rcl_*_fini() functions before this is called.
| Attribute | Adherence |
|---|---|
| Allocates Memory | Yes |
| Thread-Safe | No |
| Uses Atomics | Yes |
| Lock-Free | Yes [1] |
[1] if atomic_is_lock_free() returns true for atomic_uint_least64_t
- Parameters
-
[in] node rcl_node_t to be finalized
- Returns
- RCL_RET_OK if node was finalized successfully, or
- RCL_RET_NODE_INVALID if the node pointer is null, or
- RCL_RET_ERROR if an unspecified error occurs.
◆ rcl_node_is_valid()
| bool rcl_node_is_valid | ( | const rcl_node_t * | node | ) |
Return true if the node is valid, else false.
Also return false if the node pointer is NULL or the allocator is invalid.
A node is invalid if:
- the implementation is
NULL(rcl_node_init not called or failed) - rcl_shutdown has been called since the node has been initialized
- the node has been finalized with rcl_node_fini
There is a possible validity race condition.
Consider:
In the third line the node is now invalid, even though on the previous line of thread 1 it was checked to be valid. This is why this function is considered not thread-safe.
| Attribute | Adherence |
|---|---|
| Allocates Memory | No |
| Thread-Safe | No |
| Uses Atomics | Yes |
| Lock-Free | Yes [1] |
[1] if atomic_is_lock_free() returns true for atomic_uint_least64_t
- Parameters
-
[in] node rcl_node_t to be validated
- Returns
trueif the node and allocator are valid, otherwisefalse.
◆ rcl_node_is_valid_except_context()
| bool rcl_node_is_valid_except_context | ( | const rcl_node_t * | node | ) |
Return true if node is valid, except for the context being valid.
This is used in clean up functions that need to access the node, but do not need use any functions with the context.
It is identical to rcl_node_is_valid except it ignores the state of the context associated with the node.
- See also
- rcl_node_is_valid()
◆ rcl_node_get_name()
| const char* rcl_node_get_name | ( | const rcl_node_t * | node | ) |
Return the name of the node.
This function returns the node's internal name string. This function can fail, and therefore return NULL, if:
- node is
NULL - node has not been initialized (the implementation is invalid)
The returned string is only valid as long as the given rcl_node_t is valid. The value of the string may change if the value in the rcl_node_t changes, and therefore copying the string is recommended if this is a concern.
| Attribute | Adherence |
|---|---|
| Allocates Memory | No |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[in] node pointer to the node
- Returns
- name string if successful, otherwise
NULL
◆ rcl_node_get_namespace()
| const char* rcl_node_get_namespace | ( | const rcl_node_t * | node | ) |
Return the namespace of the node.
This function returns the node's internal namespace string. This function can fail, and therefore return NULL, if:
- node is
NULL - node has not been initialized (the implementation is invalid)
The returned string is only valid as long as the given rcl_node_t is valid. The value of the string may change if the value in the rcl_node_t changes, and therefore copying the string is recommended if this is a concern.
| Attribute | Adherence |
|---|---|
| Allocates Memory | No |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[in] node pointer to the node
- Returns
- name string if successful, otherwise
NULL
◆ rcl_node_get_fully_qualified_name()
| const char* rcl_node_get_fully_qualified_name | ( | const rcl_node_t * | node | ) |
Return the fully qualified name of the node.
This function returns the node's internal namespace and name combined string. This function can fail, and therefore return NULL, if:
- node is
NULL - node has not been initialized (the implementation is invalid)
| Attribute | Adherence |
|---|---|
| Allocates Memory | No |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[in] node pointer to the node
- Returns
- fully qualified name string if successful, otherwise
NULL
◆ rcl_node_get_options()
| const rcl_node_options_t* rcl_node_get_options | ( | const rcl_node_t * | node | ) |
Return the rcl node options.
This function returns the node's internal options struct. This function can fail, and therefore return NULL, if:
- node is
NULL - node has not been initialized (the implementation is invalid)
The returned struct is only valid as long as the given rcl_node_t is valid. The values in the struct may change if the options of the rcl_node_t changes, and therefore copying the struct is recommended if this is a concern.
| Attribute | Adherence |
|---|---|
| Allocates Memory | No |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[in] node pointer to the node
- Returns
- options struct if successful, otherwise
NULL
◆ rcl_node_get_domain_id()
| rcl_ret_t rcl_node_get_domain_id | ( | const rcl_node_t * | node, |
| size_t * | domain_id | ||
| ) |
Return the ROS domain ID that the node is using.
This function returns the ROS domain ID that the node is in.
This function should be used to determine what domain_id was used rather than checking the domain_id field in the node options, because if RCL_NODE_OPTIONS_DEFAULT_DOMAIN_ID is used when creating the node then it is not changed after creation, but this function will return the actual domain_id used.
The domain_id field must point to an allocated size_t object to which the ROS domain ID will be written.
| Attribute | Adherence |
|---|---|
| Allocates Memory | No |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[in] node the handle to the node being queried [out] domain_id storage for the domain id
- Returns
- RCL_RET_OK if node the domain ID was retrieved successfully, or
- RCL_RET_NODE_INVALID if the node is invalid, or
- RCL_RET_INVALID_ARGUMENT if any arguments are invalid, or
- RCL_RET_ERROR if an unspecified error occurs.
◆ rcl_node_get_rmw_handle()
| rmw_node_t* rcl_node_get_rmw_handle | ( | const rcl_node_t * | node | ) |
Return the rmw node handle.
The handle returned is a pointer to the internally held rmw handle. This function can fail, and therefore return NULL, if:
- node is
NULL - node has not been initialized (the implementation is invalid)
The returned handle is made invalid if the node is finalized or if rcl_shutdown() is called. The returned handle is not guaranteed to be valid for the life time of the node as it may be finalized and recreated itself. Therefore it is recommended to get the handle from the node using this function each time it is needed and avoid use of the handle concurrently with functions that might change it.
| Attribute | Adherence |
|---|---|
| Allocates Memory | No |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[in] node pointer to the rcl node
- Returns
- rmw node handle if successful, otherwise
NULL
◆ rcl_node_get_rcl_instance_id()
| uint64_t rcl_node_get_rcl_instance_id | ( | const rcl_node_t * | node | ) |
Return the associated rcl instance id.
This id is stored when rcl_node_init is called and can be compared with the value returned by rcl_get_instance_id() to check if this node was created in the current rcl context (since the latest call to rcl_init().
This function can fail, and therefore return 0, if:
- node is
NULL - node has not been initialized (the implementation is invalid)
This function will succeed even if rcl_shutdown() has been called since the node was created.
| Attribute | Adherence |
|---|---|
| Allocates Memory | No |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[in] node pointer to the rcl node
- Returns
- rcl instance id captured during node init or
0on error
◆ rcl_node_get_graph_guard_condition()
| const struct rcl_guard_condition_t* rcl_node_get_graph_guard_condition | ( | const rcl_node_t * | node | ) |
Return a guard condition which is triggered when the ROS graph changes.
The handle returned is a pointer to an internally held rcl guard condition. This function can fail, and therefore return NULL, if:
- node is
NULL - node is invalid
The returned handle is made invalid if the node is finialized or if rcl_shutdown() is called.
The guard condition will be triggered anytime a change to the ROS graph occurs. A ROS graph change includes things like (but not limited to) a new publisher advertises, a new subscription is created, a new service becomes available, a subscription is canceled, etc.
- Todo:
- TODO(wjwwood): link to exhaustive list of graph events
| Attribute | Adherence |
|---|---|
| Allocates Memory | No |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[in] node pointer to the rcl node
- Returns
- rcl guard condition handle if successful, otherwise
NULL
◆ rcl_node_get_logger_name()
| const char* rcl_node_get_logger_name | ( | const rcl_node_t * | node | ) |
Return the logger name of the node.
This function returns the node's internal logger name string. This function can fail, and therefore return NULL, if:
- node is
NULL - node has not been initialized (the implementation is invalid)
The returned string is only valid as long as the given rcl_node_t is valid. The value of the string may change if the value in the rcl_node_t changes, and therefore copying the string is recommended if this is a concern.
| Attribute | Adherence |
|---|---|
| Allocates Memory | No |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[in] node pointer to the node
- Returns
- logger_name string if successful, otherwise
NULL
◆ rcl_node_resolve_name()
| rcl_ret_t rcl_node_resolve_name | ( | const rcl_node_t * | node, |
| const char * | input_name, | ||
| rcl_allocator_t | allocator, | ||
| bool | is_service, | ||
| bool | only_expand, | ||
| char ** | output_name | ||
| ) |
Expand a given name into a fully-qualified topic name and apply remapping rules.
| Attribute | Adherence |
|---|---|
| Allocates Memory | Yes |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[in] node Node object. Its name, namespace, local/global command line arguments are used. [in] input_name Topic name to be expanded and remapped. [in] allocator The allocator to be used when creating the output topic. [in] is_service For services use true, for topics usefalse.[in] only_expand When true, remapping rules are ignored.[out] output_name Output char * pointer.
- Returns
- RCL_RET_OK if the topic name was expanded successfully, or
- RCL_RET_INVALID_ARGUMENT if any of input_name, node_name, node_namespace or output_name are NULL, or
- RCL_RET_INVALID_ARGUMENT if both local_args and global_args are NULL, or
- RCL_RET_BAD_ALLOC if allocating memory failed, or
- RCL_RET_TOPIC_NAME_INVALID if the given topic name is invalid (see rcl_validate_topic_name()), or
- RCL_RET_NODE_INVALID_NAME if the given node name is invalid (see rmw_validate_node_name()), or
- RCL_RET_NODE_INVALID_NAMESPACE if the given node namespace is invalid (see rmw_validate_namespace()), or
- RCL_RET_UNKNOWN_SUBSTITUTION for unknown substitutions in name, or
- RCL_RET_ERROR if an unspecified error occurs.
