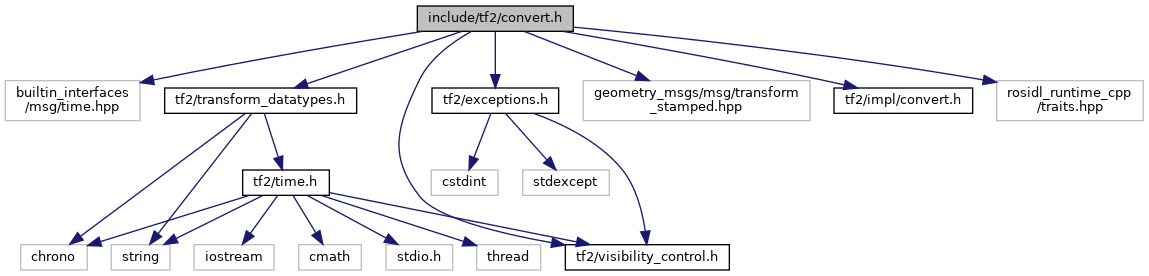
#include <builtin_interfaces/msg/time.hpp>#include <tf2/transform_datatypes.h>#include <tf2/exceptions.h>#include <geometry_msgs/msg/transform_stamped.hpp>#include <tf2/impl/convert.h>#include <tf2/visibility_control.h>#include <rosidl_runtime_cpp/traits.hpp>
Include dependency graph for convert.h:
Go to the source code of this file.
Namespaces | |
| tf2 | |
Functions | |
| template<class T > | |
| void | tf2::doTransform (const T &data_in, T &data_out, const geometry_msgs::msg::TransformStamped &transform) |
| The templated function expected to be able to do a transform. More... | |
| template<class T > | |
| tf2::TimePoint | tf2::getTimestamp (const T &t) |
| Get the timestamp from data. More... | |
| template<class T > | |
| std::string | tf2::getFrameId (const T &t) |
| Get the frame_id from data. More... | |
| template<class P > | |
| tf2::TimePoint | tf2::getTimestamp (const tf2::Stamped< P > &t) |
| template<class P > | |
| std::string | tf2::getFrameId (const tf2::Stamped< P > &t) |
| template<typename A , typename B > | |
| B | tf2::toMsg (const A &a) |
| template<typename A , typename B > | |
| void | tf2::fromMsg (const A &, B &b) |
| template<class A , class B > | |
| void | tf2::convert (const A &a, B &b) |
| template<class A > | |
| void | tf2::convert (const A &a1, A &a2) |
