#include <context.hpp>
Collaboration diagram for rmw_dds_common::Context:
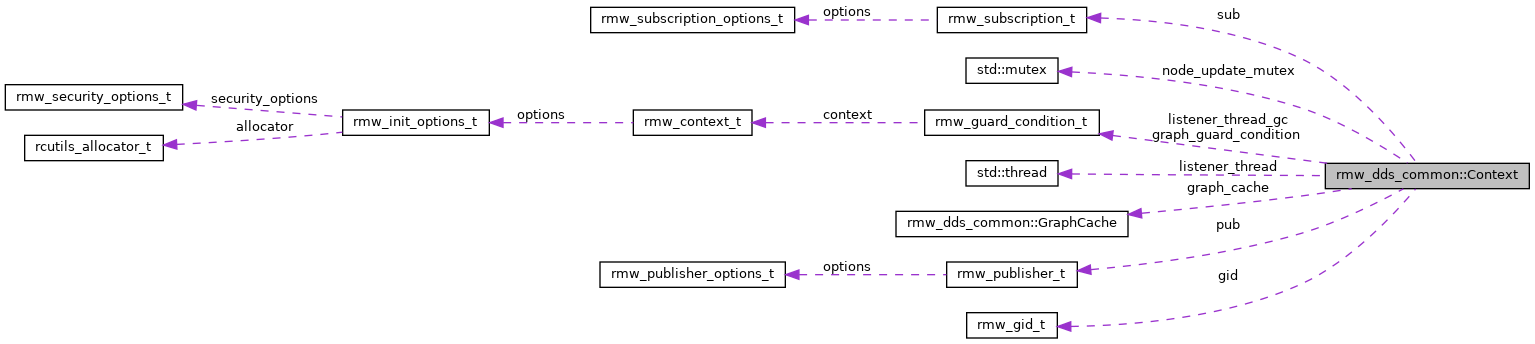
Public Attributes | |
| rmw_gid_t | gid |
| rmw_publisher_t * | pub |
| rmw_subscription_t * | sub |
| GraphCache | graph_cache |
| std::mutex | node_update_mutex |
| std::thread | listener_thread |
| std::atomic_bool | thread_is_running |
| rmw_guard_condition_t * | listener_thread_gc |
| rmw_guard_condition_t * | graph_guard_condition |
Member Data Documentation
◆ gid
| rmw_gid_t rmw_dds_common::Context::gid |
◆ pub
| rmw_publisher_t* rmw_dds_common::Context::pub |
◆ sub
| rmw_subscription_t* rmw_dds_common::Context::sub |
◆ graph_cache
| GraphCache rmw_dds_common::Context::graph_cache |
◆ node_update_mutex
| std::mutex rmw_dds_common::Context::node_update_mutex |
◆ listener_thread
| std::thread rmw_dds_common::Context::listener_thread |
◆ thread_is_running
| std::atomic_bool rmw_dds_common::Context::thread_is_running |
◆ listener_thread_gc
| rmw_guard_condition_t* rmw_dds_common::Context::listener_thread_gc |
◆ graph_guard_condition
| rmw_guard_condition_t* rmw_dds_common::Context::graph_guard_condition |
The documentation for this struct was generated from the following file:
- include/rmw_dds_common/context.hpp
