#include "rclcpp/context.hpp"#include "rclcpp/contexts/default_context.hpp"#include "rclcpp/memory_strategies.hpp"#include "rclcpp/memory_strategy.hpp"#include "rclcpp/visibility_control.hpp"
Include dependency graph for executor_options.hpp:

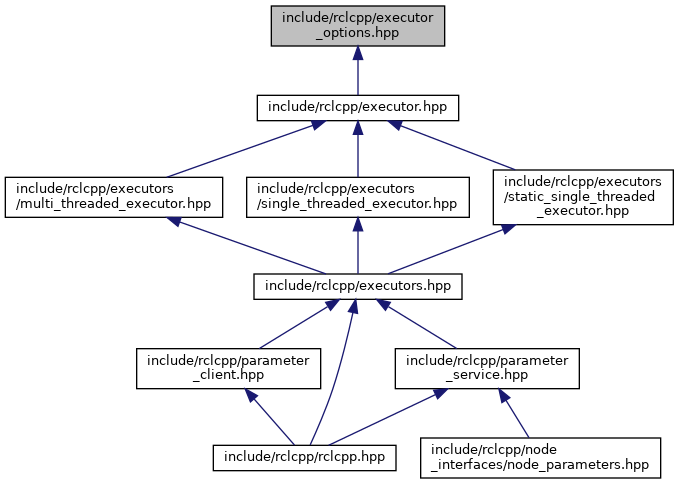
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | rclcpp::ExecutorOptions |
| Options to be passed to the executor constructor. More... | |
Namespaces | |
| rclcpp | |
| This header provides the get_node_base_interface() template function. | |
| rclcpp::executor | |
Typedefs | |
| using | rclcpp::executor::ExecutorArgs = ExecutorOptions |
Functions | |
| rclcpp::ExecutorOptions | rclcpp::executor::create_default_executor_arguments () |
