This class contains subscriptionbase, timerbase, etc. which can be used to run callbacks.
More...
#include <executable_list.hpp>
This class contains subscriptionbase, timerbase, etc. which can be used to run callbacks.
◆ ExecutableList()
| rclcpp::experimental::ExecutableList::ExecutableList |
( |
| ) |
|
◆ ~ExecutableList()
| rclcpp::experimental::ExecutableList::~ExecutableList |
( |
| ) |
|
◆ clear()
| void rclcpp::experimental::ExecutableList::clear |
( |
| ) |
|
◆ add_subscription()
| void rclcpp::experimental::ExecutableList::add_subscription |
( |
rclcpp::SubscriptionBase::SharedPtr |
subscription | ) |
|
◆ add_timer()
| void rclcpp::experimental::ExecutableList::add_timer |
( |
rclcpp::TimerBase::SharedPtr |
timer | ) |
|
◆ add_service()
| void rclcpp::experimental::ExecutableList::add_service |
( |
rclcpp::ServiceBase::SharedPtr |
service | ) |
|
◆ add_client()
| void rclcpp::experimental::ExecutableList::add_client |
( |
rclcpp::ClientBase::SharedPtr |
client | ) |
|
◆ add_waitable()
| void rclcpp::experimental::ExecutableList::add_waitable |
( |
rclcpp::Waitable::SharedPtr |
waitable | ) |
|
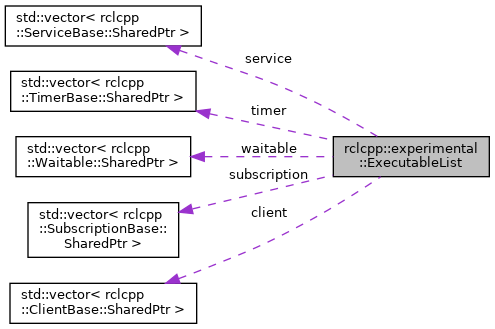
◆ subscription
| std::vector<rclcpp::SubscriptionBase::SharedPtr> rclcpp::experimental::ExecutableList::subscription |
◆ number_of_subscriptions
| size_t rclcpp::experimental::ExecutableList::number_of_subscriptions |
◆ timer
| std::vector<rclcpp::TimerBase::SharedPtr> rclcpp::experimental::ExecutableList::timer |
◆ number_of_timers
| size_t rclcpp::experimental::ExecutableList::number_of_timers |
◆ service
| std::vector<rclcpp::ServiceBase::SharedPtr> rclcpp::experimental::ExecutableList::service |
◆ number_of_services
| size_t rclcpp::experimental::ExecutableList::number_of_services |
◆ client
| std::vector<rclcpp::ClientBase::SharedPtr> rclcpp::experimental::ExecutableList::client |
◆ number_of_clients
| size_t rclcpp::experimental::ExecutableList::number_of_clients |
◆ waitable
| std::vector<rclcpp::Waitable::SharedPtr> rclcpp::experimental::ExecutableList::waitable |
◆ number_of_waitables
| size_t rclcpp::experimental::ExecutableList::number_of_waitables |
The documentation for this class was generated from the following file: