#include <cstdint>#include <string>#include <iostream>#include "rcl/network_flow_endpoints.h"#include "rclcpp/visibility_control.hpp"
Include dependency graph for network_flow_endpoint.hpp:

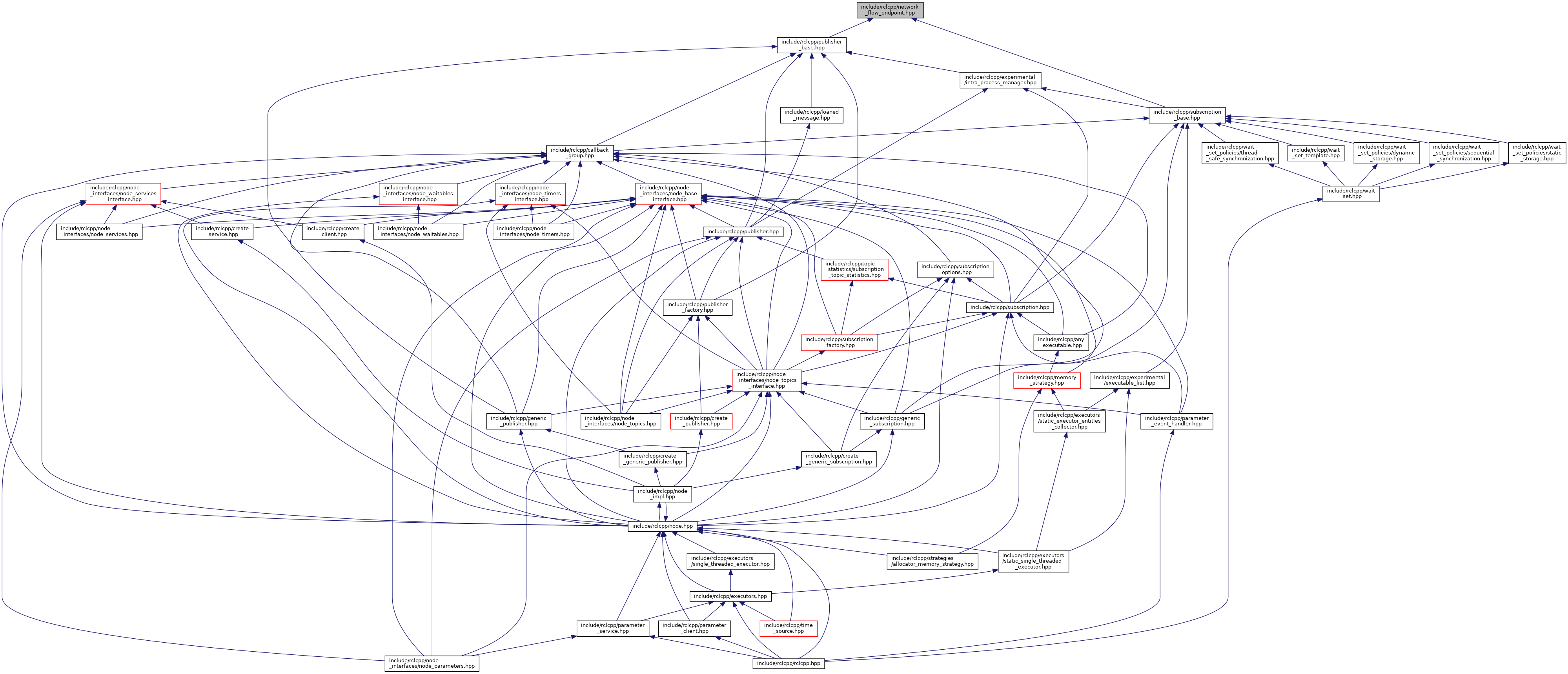
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | rclcpp::NetworkFlowEndpoint |
Namespaces | |
| rclcpp | |
| This header provides the get_node_base_interface() template function. | |
Functions | |
| bool | rclcpp::operator== (const NetworkFlowEndpoint &left, const NetworkFlowEndpoint &right) |
| Check if two NetworkFlowEndpoint instances are equal. More... | |
| bool | rclcpp::operator!= (const NetworkFlowEndpoint &left, const NetworkFlowEndpoint &right) |
| Check if two NetworkFlowEndpoint instances are not equal. More... | |
| std::ostream & | rclcpp::operator<< (std::ostream &os, const NetworkFlowEndpoint &network_flow_endpoint) |
| Streaming helper for NetworkFlowEndpoint. More... | |
