#include <functional>#include "rcl/error_handling.h"#include "rcutils/logging_macros.h"#include "rclcpp/exceptions.hpp"#include "rclcpp/function_traits.hpp"#include "rclcpp/waitable.hpp"
Include dependency graph for qos_event.hpp:

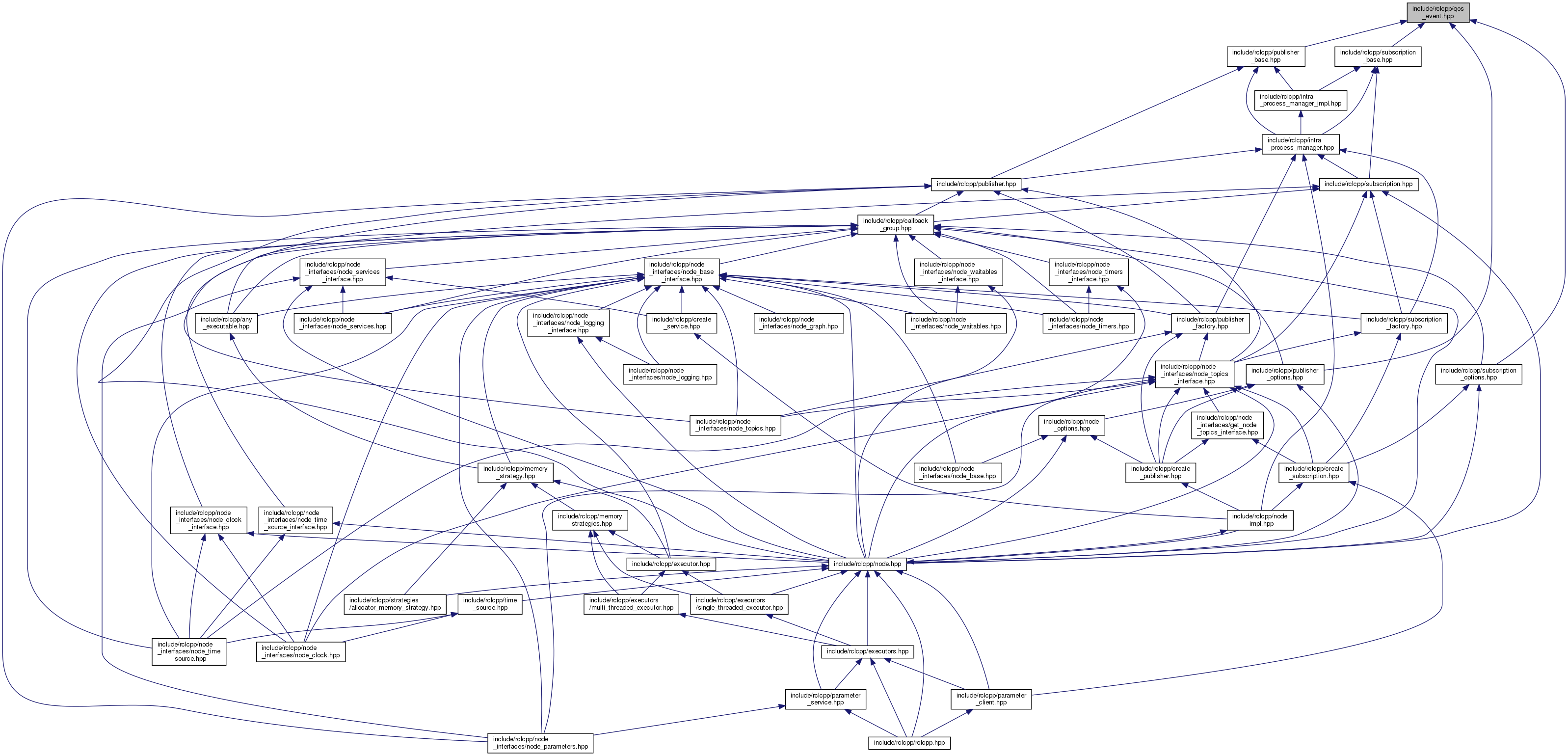
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | rclcpp::PublisherEventCallbacks |
| Contains callbacks for various types of events a Publisher can receive from the middleware. More... | |
| struct | rclcpp::SubscriptionEventCallbacks |
| Contains callbacks for non-message events that a Subscription can receive from the middleware. More... | |
| class | rclcpp::QOSEventHandlerBase |
| class | rclcpp::QOSEventHandler< EventCallbackT > |
Namespaces | |
| rclcpp | |
| This header provides the get_node_topics_interface() template function. | |
Typedefs | |
| using | rclcpp::QOSDeadlineRequestedInfo = rmw_requested_deadline_missed_status_t |
| using | rclcpp::QOSDeadlineOfferedInfo = rmw_offered_deadline_missed_status_t |
| using | rclcpp::QOSLivelinessChangedInfo = rmw_liveliness_changed_status_t |
| using | rclcpp::QOSLivelinessLostInfo = rmw_liveliness_lost_status_t |
| using | rclcpp::QOSDeadlineRequestedCallbackType = std::function< void(QOSDeadlineRequestedInfo &)> |
| using | rclcpp::QOSDeadlineOfferedCallbackType = std::function< void(QOSDeadlineOfferedInfo &)> |
| using | rclcpp::QOSLivelinessChangedCallbackType = std::function< void(QOSLivelinessChangedInfo &)> |
| using | rclcpp::QOSLivelinessLostCallbackType = std::function< void(QOSLivelinessLostInfo &)> |
