#include <rmw/error_handling.h>#include <rmw/rmw.h>#include <algorithm>#include <cstdlib>#include <iostream>#include <limits>#include <map>#include <memory>#include <sstream>#include <stdexcept>#include <string>#include <utility>#include <vector>#include "rcl/publisher.h"#include "rcl/subscription.h"#include "rcl_interfaces/msg/intra_process_message.hpp"#include "rclcpp/contexts/default_context.hpp"#include "rclcpp/create_publisher.hpp"#include "rclcpp/create_service.hpp"#include "rclcpp/create_subscription.hpp"#include "rclcpp/intra_process_manager.hpp"#include "rclcpp/parameter.hpp"#include "rclcpp/qos.hpp"#include "rclcpp/type_support_decl.hpp"#include "rclcpp/visibility_control.hpp"#include "node.hpp"
Include dependency graph for node_impl.hpp:

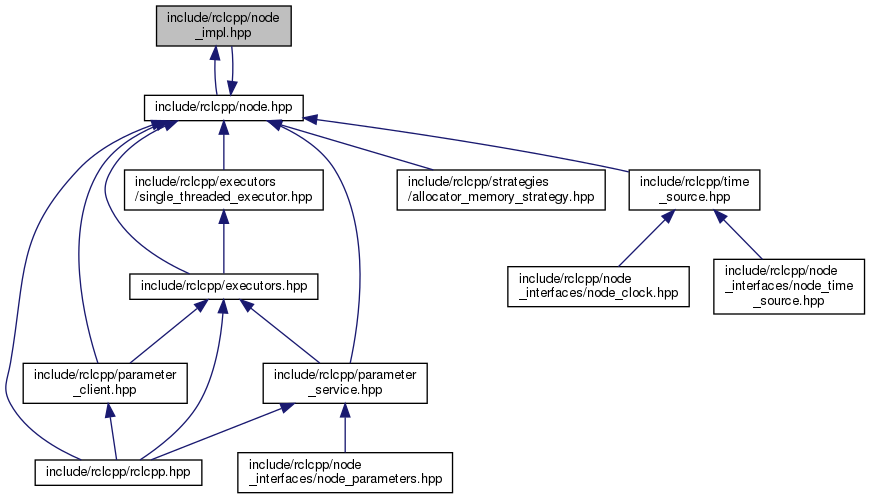
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| rclcpp | |
| This header provides the get_node_topics_interface() template function. | |
Functions | |
| RCLCPP_LOCAL std::string | rclcpp::extend_name_with_sub_namespace (const std::string &name, const std::string &sub_namespace) |
