Subscription implementation, templated on the type of message this subscription receives. More...
#include <subscription.hpp>
Public Types | |
| using | MessageAllocTraits = allocator::AllocRebind< CallbackMessageT, Alloc > |
| using | MessageAlloc = typename MessageAllocTraits::allocator_type |
| using | MessageDeleter = allocator::Deleter< MessageAlloc, CallbackMessageT > |
| using | MessageUniquePtr = std::unique_ptr< CallbackMessageT, MessageDeleter > |
| using | GetMessageCallbackType = std::function< void(uint64_t, uint64_t, uint64_t, MessageUniquePtr &)> |
| using | MatchesAnyPublishersCallbackType = std::function< bool(const rmw_gid_t *)> |
Public Member Functions | |
| Subscription (std::shared_ptr< rcl_node_t > node_handle, const rosidl_message_type_support_t &type_support_handle, const std::string &topic_name, const rcl_subscription_options_t &subscription_options, AnySubscriptionCallback< CallbackMessageT, Alloc > callback, typename message_memory_strategy::MessageMemoryStrategy< CallbackMessageT, Alloc >::SharedPtr memory_strategy=message_memory_strategy::MessageMemoryStrategy< CallbackMessageT, Alloc >::create_default()) | |
| Default constructor. More... | |
| void | set_message_memory_strategy (typename message_memory_strategy::MessageMemoryStrategy< CallbackMessageT, Alloc >::SharedPtr message_memory_strategy) |
| Support dynamically setting the message memory strategy. More... | |
| std::shared_ptr< void > | create_message () |
| Borrow a new message. More... | |
| std::shared_ptr< rcl_serialized_message_t > | create_serialized_message () |
| Borrow a new serialized message. More... | |
| void | handle_message (std::shared_ptr< void > &message, const rmw_message_info_t &message_info) |
| Check if we need to handle the message, and execute the callback if we do. More... | |
| void | return_message (std::shared_ptr< void > &message) |
| Return the loaned message. More... | |
| void | return_serialized_message (std::shared_ptr< rcl_serialized_message_t > &message) |
| Return the message borrowed in create_serialized_message. More... | |
| void | handle_intra_process_message (rcl_interfaces::msg::IntraProcessMessage &ipm, const rmw_message_info_t &message_info) |
| void | setup_intra_process (uint64_t intra_process_subscription_id, GetMessageCallbackType get_message_callback, MatchesAnyPublishersCallbackType matches_any_publisher_callback, const rcl_subscription_options_t &intra_process_options) |
| Implemenation detail. More... | |
| const std::shared_ptr< rcl_subscription_t > | get_intra_process_subscription_handle () const |
| Implemenation detail. More... | |
 Public Member Functions inherited from rclcpp::SubscriptionBase Public Member Functions inherited from rclcpp::SubscriptionBase | |
| SubscriptionBase (std::shared_ptr< rcl_node_t > node_handle, const rosidl_message_type_support_t &type_support_handle, const std::string &topic_name, const rcl_subscription_options_t &subscription_options, bool is_serialized=false) | |
| Default constructor. More... | |
| virtual | ~SubscriptionBase () |
| Default destructor. More... | |
| const char * | get_topic_name () const |
| Get the topic that this subscription is subscribed on. More... | |
| std::shared_ptr< rcl_subscription_t > | get_subscription_handle () |
| const std::shared_ptr< rcl_subscription_t > | get_subscription_handle () const |
| const rosidl_message_type_support_t & | get_message_type_support_handle () const |
| bool | is_serialized () const |
Friends | |
| class | rclcpp::node_interfaces::NodeTopicsInterface |
Additional Inherited Members | |
| Protected Attributes inherited from rclcpp::SubscriptionBase | |
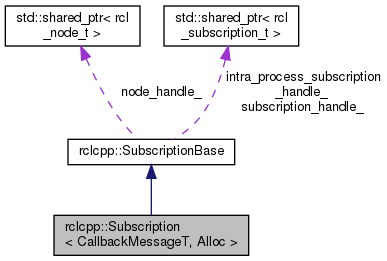
| std::shared_ptr< rcl_subscription_t > | intra_process_subscription_handle_ |
| std::shared_ptr< rcl_subscription_t > | subscription_handle_ |
| std::shared_ptr< rcl_node_t > | node_handle_ |
Detailed Description
template<typename CallbackMessageT, typename Alloc = std::allocator<void>>
class rclcpp::Subscription< CallbackMessageT, Alloc >
Subscription implementation, templated on the type of message this subscription receives.
Member Typedef Documentation
◆ MessageAllocTraits
| using rclcpp::Subscription< CallbackMessageT, Alloc >::MessageAllocTraits = allocator::AllocRebind<CallbackMessageT, Alloc> |
◆ MessageAlloc
| using rclcpp::Subscription< CallbackMessageT, Alloc >::MessageAlloc = typename MessageAllocTraits::allocator_type |
◆ MessageDeleter
| using rclcpp::Subscription< CallbackMessageT, Alloc >::MessageDeleter = allocator::Deleter<MessageAlloc, CallbackMessageT> |
◆ MessageUniquePtr
| using rclcpp::Subscription< CallbackMessageT, Alloc >::MessageUniquePtr = std::unique_ptr<CallbackMessageT, MessageDeleter> |
◆ GetMessageCallbackType
| using rclcpp::Subscription< CallbackMessageT, Alloc >::GetMessageCallbackType = std::function<void (uint64_t, uint64_t, uint64_t, MessageUniquePtr &)> |
◆ MatchesAnyPublishersCallbackType
| using rclcpp::Subscription< CallbackMessageT, Alloc >::MatchesAnyPublishersCallbackType = std::function<bool (const rmw_gid_t *)> |
Constructor & Destructor Documentation
◆ Subscription()
|
inline |
Default constructor.
The constructor for a subscription is almost never called directly. Instead, subscriptions should be instantiated through Node::create_subscription.
- Parameters
-
[in] node_handle rcl representation of the node that owns this subscription. [in] type_support_handle rosidl type support struct, for the Message type of the topic. [in] topic_name Name of the topic to subscribe to. [in] subscription_options options for the subscription. [in] callback User defined callback to call when a message is received. [in] memory_strategy The memory strategy to be used for managing message memory.
Member Function Documentation
◆ set_message_memory_strategy()
|
inline |
Support dynamically setting the message memory strategy.
Behavior may be undefined if called while the subscription could be executing.
- Parameters
-
[in] message_memory_strategy Shared pointer to the memory strategy to set.
◆ create_message()
|
inlinevirtual |
Borrow a new message.
- Returns
- Shared pointer to the fresh message.
Implements rclcpp::SubscriptionBase.
◆ create_serialized_message()
|
inlinevirtual |
Borrow a new serialized message.
- Returns
- Shared pointer to a rcl_message_serialized_t.
Implements rclcpp::SubscriptionBase.
◆ handle_message()
|
inlinevirtual |
Check if we need to handle the message, and execute the callback if we do.
- Parameters
-
[in] message Shared pointer to the message to handle. [in] message_info Metadata associated with this message.
Implements rclcpp::SubscriptionBase.
◆ return_message()
|
inlinevirtual |
Return the loaned message.
- Parameters
-
message message to be returned
Implements rclcpp::SubscriptionBase.
◆ return_serialized_message()
|
inlinevirtual |
Return the message borrowed in create_serialized_message.
- Parameters
-
[in] message Shared pointer to the returned message.
Implements rclcpp::SubscriptionBase.
◆ handle_intra_process_message()
|
inlinevirtual |
Implements rclcpp::SubscriptionBase.
◆ setup_intra_process()
|
inline |
Implemenation detail.
◆ get_intra_process_subscription_handle()
|
inlinevirtual |
Implemenation detail.
Reimplemented from rclcpp::SubscriptionBase.
Friends And Related Function Documentation
◆ rclcpp::node_interfaces::NodeTopicsInterface
|
friend |
The documentation for this class was generated from the following file:
- include/rclcpp/subscription.hpp
