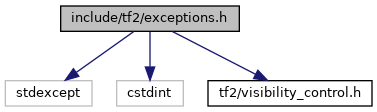
Include dependency graph for exceptions.h:
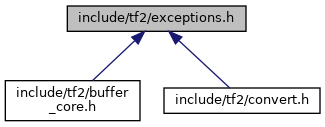
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | tf2::TransformException |
| A base class for all tf2 exceptions This inherits from ros::exception which inherits from std::runtime_exception. More... | |
| class | tf2::ConnectivityException |
| An exception class to notify of no connection. More... | |
| class | tf2::LookupException |
| An exception class to notify of bad frame number. More... | |
| class | tf2::ExtrapolationException |
| An exception class to notify that the requested value would have required extrapolation beyond current limits. More... | |
| class | tf2::InvalidArgumentException |
| An exception class to notify that one of the arguments is invalid. More... | |
| class | tf2::TimeoutException |
| An exception class to notify that a timeout has occured. More... | |
Namespaces | |
| tf2 | |
Enumerations | |
| enum | tf2::TF2Error : std::uint8_t { tf2::TF2Error::NO_ERROR = 0, tf2::TF2Error::LOOKUP_ERROR = 1, tf2::TF2Error::CONNECTIVITY_ERROR = 2, tf2::TF2Error::EXTRAPOLATION_ERROR = 3, tf2::TF2Error::INVALID_ARGUMENT_ERROR = 4, tf2::TF2Error::TIMEOUT_ERROR = 5, tf2::TF2Error::TRANSFORM_ERROR = 6 } |
