#include <rcl_action/action_client.h>#include <action_msgs/msg/goal_status.hpp>#include <rclcpp/macros.hpp>#include <rclcpp/time.hpp>#include <functional>#include <future>#include <memory>#include <mutex>#include "rclcpp_action/types.hpp"#include "rclcpp_action/visibility_control.hpp"#include <rclcpp_action/client_goal_handle_impl.hpp>
Include dependency graph for client_goal_handle.hpp:

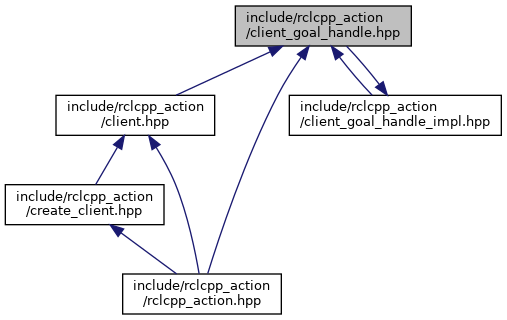
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | rclcpp_action::Client< ActionT > |
| Action Client. More... | |
| class | rclcpp_action::ClientGoalHandle< ActionT > |
| Class for interacting with goals sent from action clients. More... | |
| struct | rclcpp_action::ClientGoalHandle< ActionT >::WrappedResult |
Namespaces | |
| rclcpp_action | |
Enumerations | |
| enum | rclcpp_action::ResultCode : int8_t { rclcpp_action::ResultCode::UNKNOWN = action_msgs::msg::GoalStatus::STATUS_UNKNOWN, rclcpp_action::ResultCode::SUCCEEDED = action_msgs::msg::GoalStatus::STATUS_SUCCEEDED, rclcpp_action::ResultCode::CANCELED = action_msgs::msg::GoalStatus::STATUS_CANCELED, rclcpp_action::ResultCode::ABORTED = action_msgs::msg::GoalStatus::STATUS_ABORTED } |
| The possible statuses that an action goal can finish with. More... | |
