#include <client.hpp>
Public Member Functions | |
| ClientBase (rclcpp::node_interfaces::NodeBaseInterface *node_base, rclcpp::node_interfaces::NodeGraphInterface::SharedPtr node_graph) | |
| virtual | ~ClientBase () |
| bool | take_type_erased_response (void *response_out, rmw_request_id_t &request_header_out) |
| Take the next response for this client as a type erased pointer. More... | |
| const char * | get_service_name () const |
| Return the name of the service. More... | |
| std::shared_ptr< rcl_client_t > | get_client_handle () |
| Return the rcl_client_t client handle in a std::shared_ptr. More... | |
| std::shared_ptr< const rcl_client_t > | get_client_handle () const |
| Return the rcl_client_t client handle in a std::shared_ptr. More... | |
| bool | service_is_ready () const |
| Return if the service is ready. More... | |
| template<typename RepT = int64_t, typename RatioT = std::milli> | |
| bool | wait_for_service (std::chrono::duration< RepT, RatioT > timeout=std::chrono::duration< RepT, RatioT >(-1)) |
| Wait for a service to be ready. More... | |
| virtual std::shared_ptr< void > | create_response ()=0 |
| virtual std::shared_ptr< rmw_request_id_t > | create_request_header ()=0 |
| virtual void | handle_response (std::shared_ptr< rmw_request_id_t > request_header, std::shared_ptr< void > response)=0 |
| bool | exchange_in_use_by_wait_set_state (bool in_use_state) |
| Exchange the "in use by wait set" state for this client. More... | |
Protected Member Functions | |
| bool | wait_for_service_nanoseconds (std::chrono::nanoseconds timeout) |
| rcl_node_t * | get_rcl_node_handle () |
| const rcl_node_t * | get_rcl_node_handle () const |
Protected Attributes | |
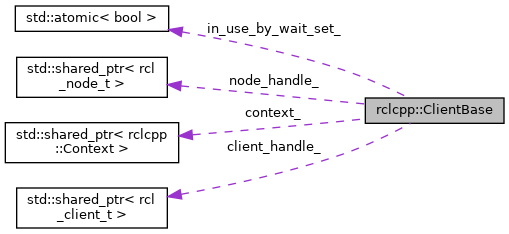
| rclcpp::node_interfaces::NodeGraphInterface::WeakPtr | node_graph_ |
| std::shared_ptr< rcl_node_t > | node_handle_ |
| std::shared_ptr< rclcpp::Context > | context_ |
| std::shared_ptr< rcl_client_t > | client_handle_ |
| std::atomic< bool > | in_use_by_wait_set_ {false} |
Constructor & Destructor Documentation
◆ ClientBase()
| rclcpp::ClientBase::ClientBase | ( | rclcpp::node_interfaces::NodeBaseInterface * | node_base, |
| rclcpp::node_interfaces::NodeGraphInterface::SharedPtr | node_graph | ||
| ) |
◆ ~ClientBase()
|
virtual |
Member Function Documentation
◆ take_type_erased_response()
| bool rclcpp::ClientBase::take_type_erased_response | ( | void * | response_out, |
| rmw_request_id_t & | request_header_out | ||
| ) |
Take the next response for this client as a type erased pointer.
The type erased pointer allows for this method to be used in a type agnostic way along with ClientBase::create_response(), ClientBase::create_request_header(), and ClientBase::handle_response(). The typed version of this can be used if the Service type is known,
- See also
- Client::take_response().
- Parameters
-
[out] response_out The type erased pointer to a Service Response into which the middleware will copy the response being taken. [out] request_header_out The request header to be filled by the middleware when taking, and which can be used to associte the response to a specific request.
- Returns
- true if the response was taken, otherwise false.
- Exceptions
-
rclcpp::exceptions::RCLError based exceptions if the underlying rcl function fail.
◆ get_service_name()
| const char* rclcpp::ClientBase::get_service_name | ( | ) | const |
Return the name of the service.
- Returns
- The name of the service.
◆ get_client_handle() [1/2]
| std::shared_ptr<rcl_client_t> rclcpp::ClientBase::get_client_handle | ( | ) |
Return the rcl_client_t client handle in a std::shared_ptr.
This handle remains valid after the Client is destroyed. The actual rcl client is not finalized until it is out of scope everywhere.
◆ get_client_handle() [2/2]
| std::shared_ptr<const rcl_client_t> rclcpp::ClientBase::get_client_handle | ( | ) | const |
Return the rcl_client_t client handle in a std::shared_ptr.
This handle remains valid after the Client is destroyed. The actual rcl client is not finalized until it is out of scope everywhere.
◆ service_is_ready()
| bool rclcpp::ClientBase::service_is_ready | ( | ) | const |
Return if the service is ready.
- Returns
trueif the service is ready,falseotherwise
◆ wait_for_service()
|
inline |
Wait for a service to be ready.
- Parameters
-
timeout maximum time to wait
- Returns
trueif the service is ready and the timeout is not over,falseotherwise
◆ create_response()
|
pure virtual |
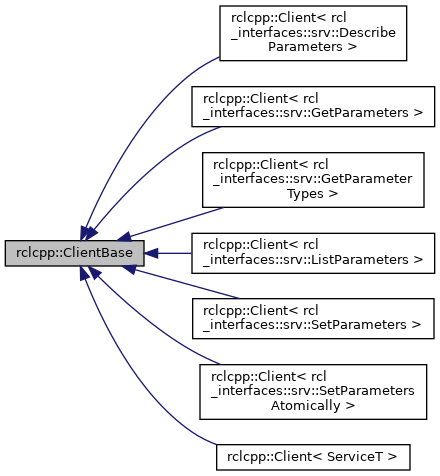
Implemented in rclcpp::Client< ServiceT >, rclcpp::Client< rcl_interfaces::srv::DescribeParameters >, rclcpp::Client< rcl_interfaces::srv::GetParameterTypes >, rclcpp::Client< rcl_interfaces::srv::ListParameters >, rclcpp::Client< rcl_interfaces::srv::SetParameters >, rclcpp::Client< rcl_interfaces::srv::SetParametersAtomically >, and rclcpp::Client< rcl_interfaces::srv::GetParameters >.
◆ create_request_header()
|
pure virtual |
Implemented in rclcpp::Client< ServiceT >, rclcpp::Client< rcl_interfaces::srv::DescribeParameters >, rclcpp::Client< rcl_interfaces::srv::GetParameterTypes >, rclcpp::Client< rcl_interfaces::srv::ListParameters >, rclcpp::Client< rcl_interfaces::srv::SetParameters >, rclcpp::Client< rcl_interfaces::srv::SetParametersAtomically >, and rclcpp::Client< rcl_interfaces::srv::GetParameters >.
◆ handle_response()
|
pure virtual |
Implemented in rclcpp::Client< ServiceT >, rclcpp::Client< rcl_interfaces::srv::DescribeParameters >, rclcpp::Client< rcl_interfaces::srv::GetParameterTypes >, rclcpp::Client< rcl_interfaces::srv::ListParameters >, rclcpp::Client< rcl_interfaces::srv::SetParameters >, rclcpp::Client< rcl_interfaces::srv::SetParametersAtomically >, and rclcpp::Client< rcl_interfaces::srv::GetParameters >.
◆ exchange_in_use_by_wait_set_state()
| bool rclcpp::ClientBase::exchange_in_use_by_wait_set_state | ( | bool | in_use_state | ) |
Exchange the "in use by wait set" state for this client.
This is used to ensure this client is not used by multiple wait sets at the same time.
- Parameters
-
[in] in_use_state the new state to exchange into the state, true indicates it is now in use by a wait set, and false is that it is no longer in use by a wait set.
- Returns
- the previous state.
◆ wait_for_service_nanoseconds()
|
protected |
◆ get_rcl_node_handle() [1/2]
|
protected |
◆ get_rcl_node_handle() [2/2]
|
protected |
Member Data Documentation
◆ node_graph_
|
protected |
◆ node_handle_
|
protected |
◆ context_
|
protected |
◆ client_handle_
|
protected |
◆ in_use_by_wait_set_
|
protected |
The documentation for this class was generated from the following file:
- include/rclcpp/client.hpp
