Options available for a rcl_action_server_t. More...
#include <action_server.h>
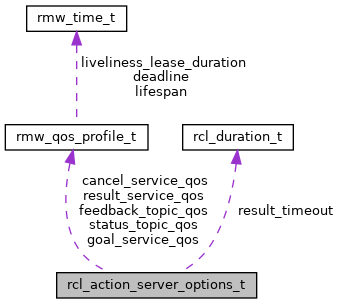
Collaboration diagram for rcl_action_server_options_t:
Public Attributes | |
| rmw_qos_profile_t | goal_service_qos |
| rmw_qos_profile_t | cancel_service_qos |
| Cancel service quality of service. | |
| rmw_qos_profile_t | result_service_qos |
| Result service quality of service. | |
| rmw_qos_profile_t | feedback_topic_qos |
| Feedback topic quality of service. | |
| rmw_qos_profile_t | status_topic_qos |
| Status topic quality of service. | |
| rcl_allocator_t | allocator |
| Custom allocator for the action server, used for incidental allocations. More... | |
| rcl_duration_t | result_timeout |
| Goal handles that have results longer than this time are deallocated. | |
Detailed Description
Options available for a rcl_action_server_t.
Member Data Documentation
◆ goal_service_qos
| rmw_qos_profile_t rcl_action_server_options_t::goal_service_qos |
Middleware quality of service settings for the action server. Goal service quality of service
◆ allocator
| rcl_allocator_t rcl_action_server_options_t::allocator |
Custom allocator for the action server, used for incidental allocations.
For default behavior (malloc/free), see: rcl_get_default_allocator()
The documentation for this struct was generated from the following file:
- include/rcl_action/action_server.h
