|
| | LifecyclePublisher (rclcpp::node_interfaces::NodeBaseInterface *node_base, const std::string &topic, const rclcpp::QoS &qos, const rclcpp::PublisherOptionsWithAllocator< Alloc > &options) |
| |
| | ~LifecyclePublisher () |
| |
| virtual void | publish (std::unique_ptr< MessageT, MessageDeleter > msg) |
| | LifecyclePublisher publish function. More...
|
| |
| virtual void | publish (const MessageT &msg) |
| | LifecyclePublisher publish function. More...
|
| |
| virtual void | on_activate () |
| |
| virtual void | on_deactivate () |
| |
| virtual bool | is_activated () |
| |
| virtual | ~LifecyclePublisherInterface () |
| |
| | Publisher (rclcpp::node_interfaces::NodeBaseInterface *node_base, const std::string &topic, const rclcpp::QoS &qos, const rclcpp::PublisherOptionsWithAllocator< AllocatorT > &options) |
| |
| virtual void | post_init_setup (rclcpp::node_interfaces::NodeBaseInterface *node_base, const std::string &topic, const rclcpp::QoS &qos, const rclcpp::PublisherOptionsWithAllocator< AllocatorT > &options) |
| |
| virtual | ~Publisher () |
| |
| rclcpp::LoanedMessage< MessageT, AllocatorT > | borrow_loaned_message () |
| |
| virtual void | publish (std::unique_ptr< MessageT, MessageDeleter > msg) |
| |
| void | publish (const rcl_serialized_message_t &serialized_msg) |
| |
| void | publish (const SerializedMessage &serialized_msg) |
| |
| void | publish (rclcpp::LoanedMessage< MessageT, AllocatorT > &&loaned_msg) |
| |
| std::shared_ptr< MessageAllocator > | get_allocator () const |
| |
| | PublisherBase (rclcpp::node_interfaces::NodeBaseInterface *node_base, const std::string &topic, const rosidl_message_type_support_t &type_support, const rcl_publisher_options_t &publisher_options) |
| |
| virtual | ~PublisherBase () |
| |
| const char * | get_topic_name () const |
| |
| size_t | get_queue_size () const |
| |
| const rmw_gid_t & | get_gid () const |
| |
| std::shared_ptr< rcl_publisher_t > | get_publisher_handle () |
| |
| std::shared_ptr< const rcl_publisher_t > | get_publisher_handle () const |
| |
| const std::vector< std::shared_ptr< rclcpp::QOSEventHandlerBase > > & | get_event_handlers () const |
| |
| size_t | get_subscription_count () const |
| |
| size_t | get_intra_process_subscription_count () const |
| |
| RCUTILS_WARN_UNUSED bool | assert_liveliness () const |
| |
| rclcpp::QoS | get_actual_qos () const |
| |
| bool | can_loan_messages () const |
| |
| bool | operator== (const rmw_gid_t &gid) const |
| |
| bool | operator== (const rmw_gid_t *gid) const |
| |
| void | setup_intra_process (uint64_t intra_process_publisher_id, IntraProcessManagerSharedPtr ipm) |
| |
| std::vector< rclcpp::NetworkFlowEndpoint > | get_network_flow_endpoints () const |
| |
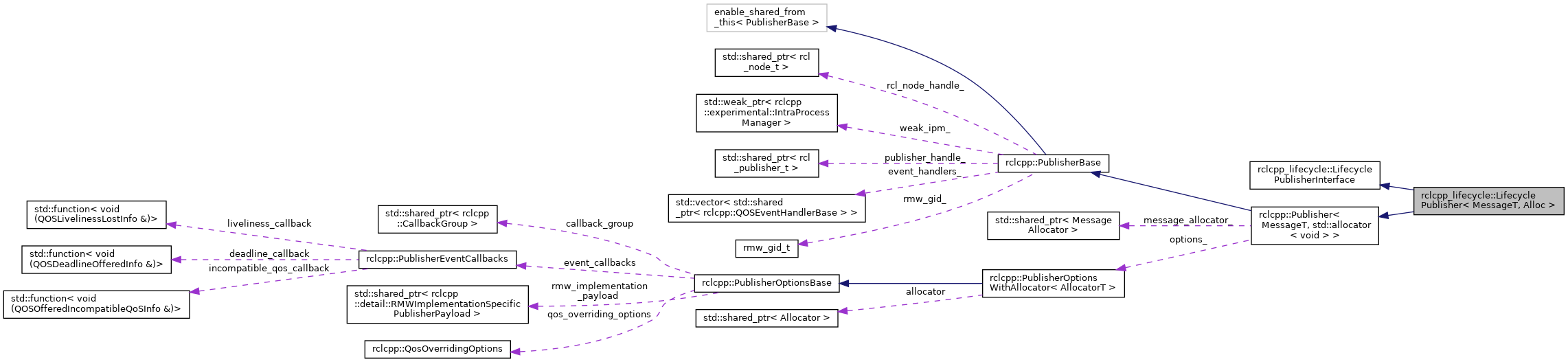
template<typename MessageT, typename Alloc = std::allocator<void>>
class rclcpp_lifecycle::LifecyclePublisher< MessageT, Alloc >
brief child class of rclcpp Publisher class.
Overrides all publisher functions to check for enabled/disabled state.

 Public Types inherited from rclcpp::Publisher< MessageT, std::allocator< void > >
Public Types inherited from rclcpp::Publisher< MessageT, std::allocator< void > >