#include <memory>#include <string>#include <tuple>#include "rcpputils/shared_library.hpp"#include "rosidl_runtime_cpp/message_type_support_decl.hpp"#include "rclcpp/visibility_control.hpp"
Include dependency graph for typesupport_helpers.hpp:

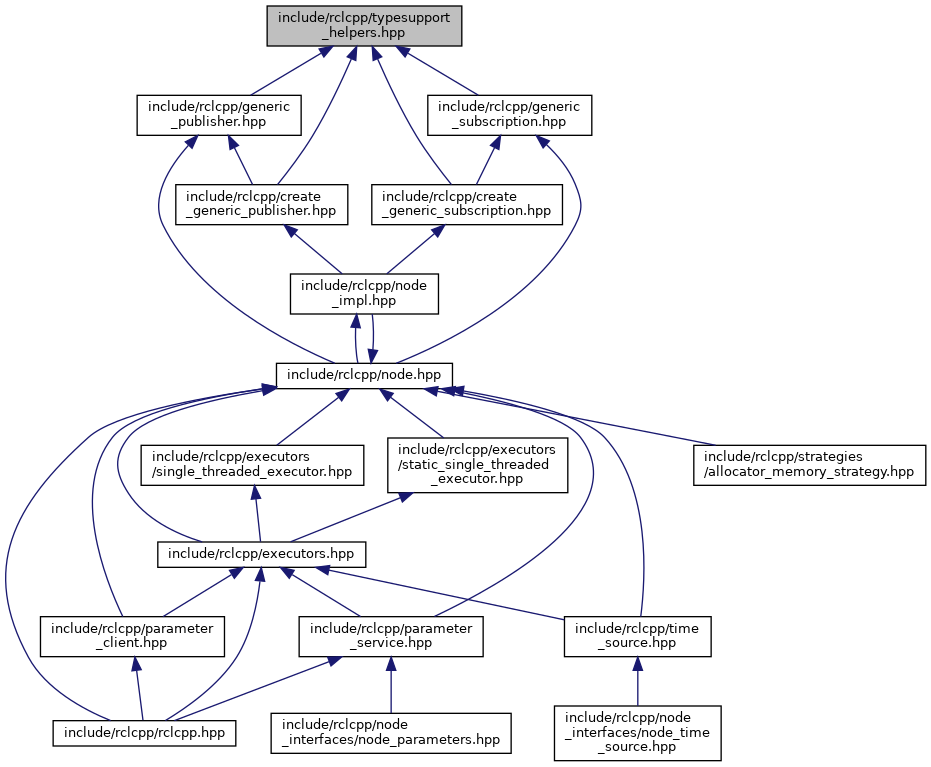
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| rclcpp | |
| This header provides the get_node_base_interface() template function. | |
Functions | |
| std::shared_ptr< rcpputils::SharedLibrary > | rclcpp::get_typesupport_library (const std::string &type, const std::string &typesupport_identifier) |
| Load the type support library for the given type. More... | |
| const rosidl_message_type_support_t * | rclcpp::get_typesupport_handle (const std::string &type, const std::string &typesupport_identifier, rcpputils::SharedLibrary &library) |
| Extract the type support handle from the library. More... | |
