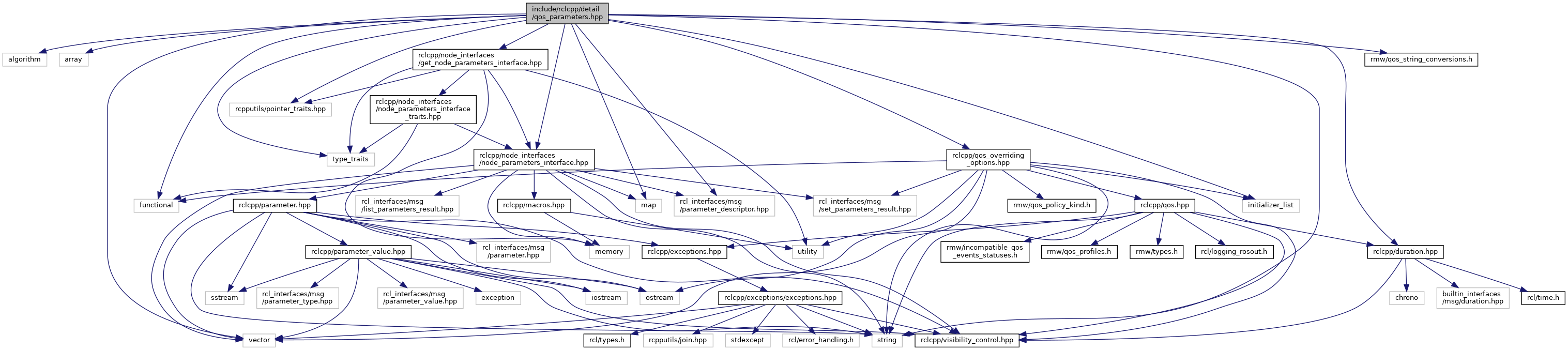
#include <algorithm>#include <array>#include <functional>#include <initializer_list>#include <map>#include <string>#include <type_traits>#include <vector>#include "rcl_interfaces/msg/parameter_descriptor.hpp"#include "rcpputils/pointer_traits.hpp"#include "rmw/qos_string_conversions.h"#include "rclcpp/duration.hpp"#include "rclcpp/node_interfaces/get_node_parameters_interface.hpp"#include "rclcpp/node_interfaces/node_parameters_interface.hpp"#include "rclcpp/qos_overriding_options.hpp"
Include dependency graph for qos_parameters.hpp:
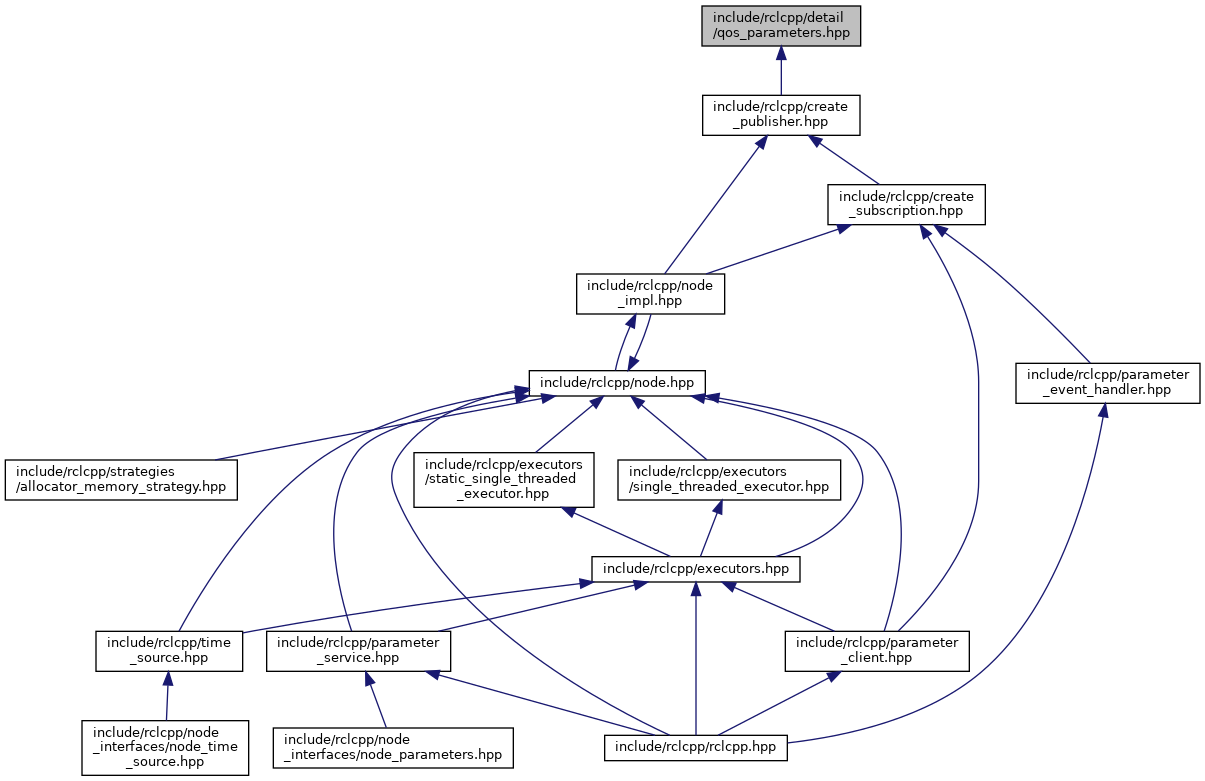
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | rclcpp::detail::PublisherQosParametersTraits |
| struct | rclcpp::detail::SubscriptionQosParametersTraits |
Namespaces | |
| rclcpp | |
| This header provides the get_node_base_interface() template function. | |
| rclcpp::detail | |
Macros | |
| #define | RCLCPP_DETAIL_APPLY_QOS_OVERRIDE_FROM_PARAMETER_STRING(kind_lower, kind_upper, parameter_value, rclcpp_qos) |
Functions | |
| inline ::rclcpp::ParameterValue | rclcpp::detail::get_default_qos_param_value (rclcpp::QosPolicyKind policy, const rclcpp::QoS &qos) |
| void | rclcpp::detail::apply_qos_override (rclcpp::QosPolicyKind policy, rclcpp::ParameterValue value, rclcpp::QoS &qos) |
| rclcpp::ParameterValue | rclcpp::detail::declare_parameter_or_get (rclcpp::node_interfaces::NodeParametersInterface ¶meters_interface, const std::string ¶m_name, rclcpp::ParameterValue param_value, rcl_interfaces::msg::ParameterDescriptor descriptor) |
| template<typename NodeT , typename EntityQosParametersTraits > | |
| std::enable_if_t< rclcpp::node_interfaces::has_node_parameters_interface< decltype(std::declval< typename rcpputils::remove_pointer< NodeT >::type >))>::value||std::is_same< typename std::decay_t< NodeT >, rclcpp::node_interfaces::NodeParametersInterface::SharedPtr >::value, rclcpp::QoS > | rclcpp::detail::declare_qos_parameters (const ::rclcpp::QosOverridingOptions &options, NodeT &node, const std::string &topic_name, const ::rclcpp::QoS &default_qos, EntityQosParametersTraits) |
| int64_t | rclcpp::detail::rmw_duration_to_int64_t (rmw_time_t rmw_duration) |
Convert rmw_time_t to int64_t that can be used as a parameter value. More... | |
| const char * | rclcpp::detail::check_if_stringified_policy_is_null (const char *policy_value_stringified, QosPolicyKind kind) |
Macro Definition Documentation
◆ RCLCPP_DETAIL_APPLY_QOS_OVERRIDE_FROM_PARAMETER_STRING
| #define RCLCPP_DETAIL_APPLY_QOS_OVERRIDE_FROM_PARAMETER_STRING | ( | kind_lower, | |
| kind_upper, | |||
| parameter_value, | |||
| rclcpp_qos | |||
| ) |
Value:
do { \
auto policy_string = (parameter_value).get<std::string>(); \
auto policy_value = rmw_qos_ ## kind_lower ## _policy_from_str(policy_string.c_str()); \
if (RMW_QOS_POLICY_ ## kind_upper ## _UNKNOWN == policy_value) { \
} \
((rclcpp_qos).kind_lower)(policy_value); \
} while (0)
