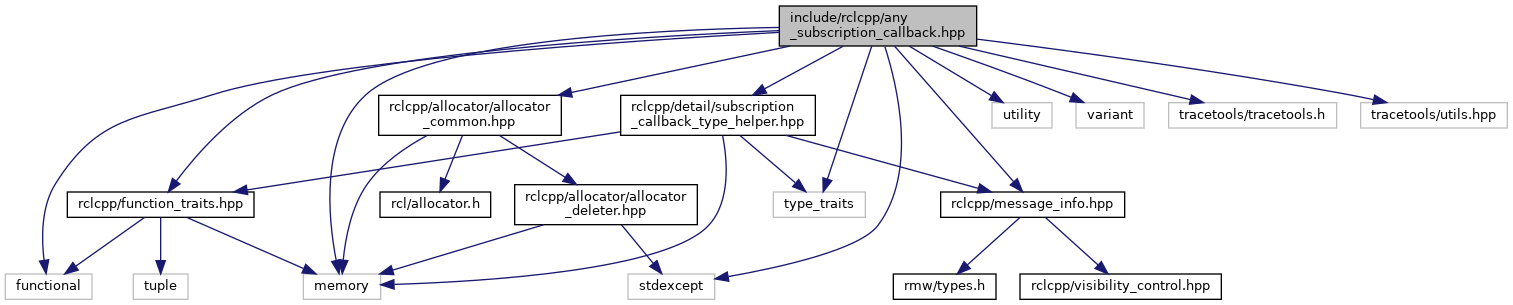
#include <functional>#include <memory>#include <stdexcept>#include <type_traits>#include <utility>#include <variant>#include "tracetools/tracetools.h"#include "tracetools/utils.hpp"#include "rclcpp/allocator/allocator_common.hpp"#include "rclcpp/detail/subscription_callback_type_helper.hpp"#include "rclcpp/function_traits.hpp"#include "rclcpp/message_info.hpp"
Include dependency graph for any_subscription_callback.hpp:
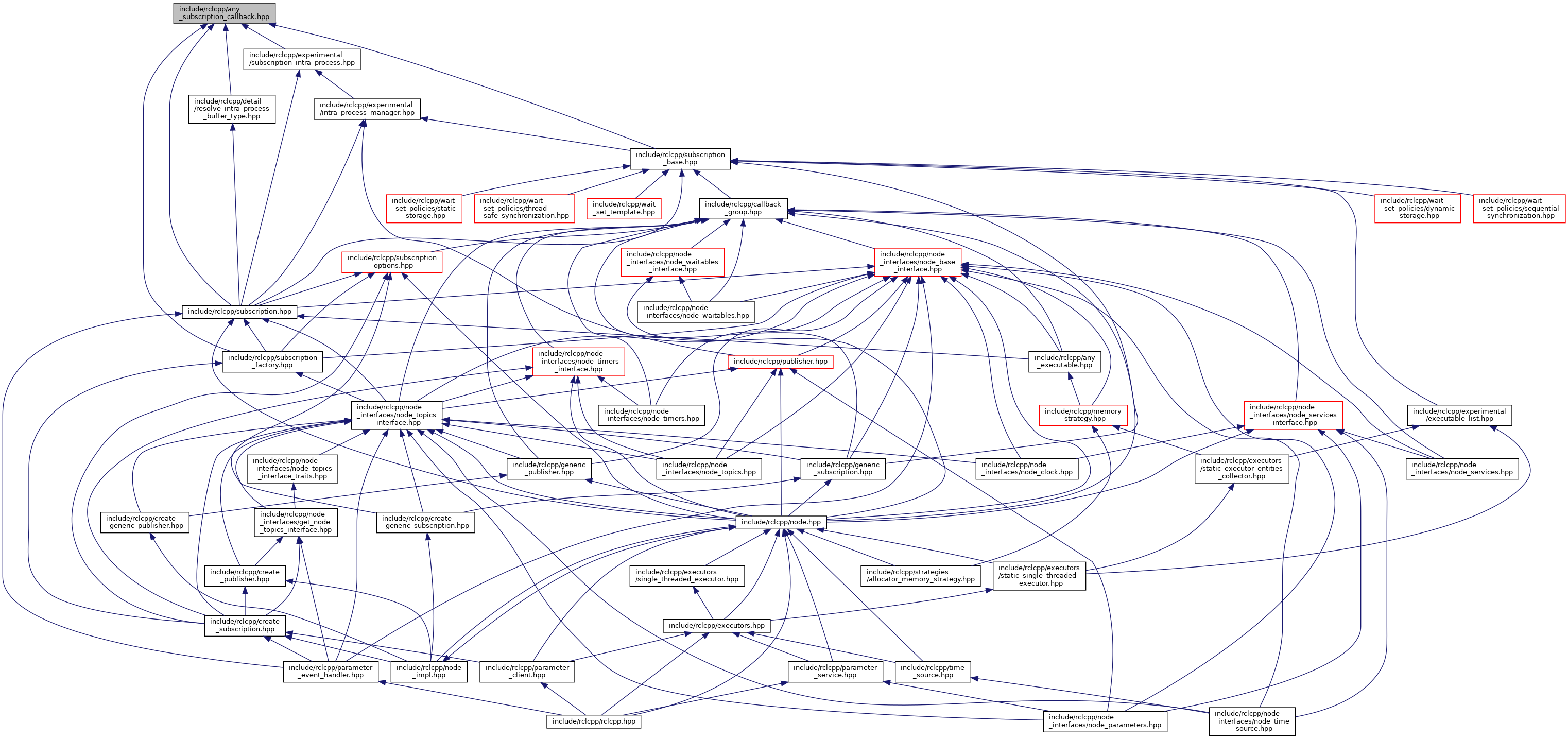
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| rclcpp | |
| This header provides the get_node_base_interface() template function. | |
| rclcpp::detail | |
Variables | |
| template<class > | |
| constexpr bool | always_false_v = false |
Variable Documentation
◆ always_false_v
template<class >
|
inlineconstexpr |
