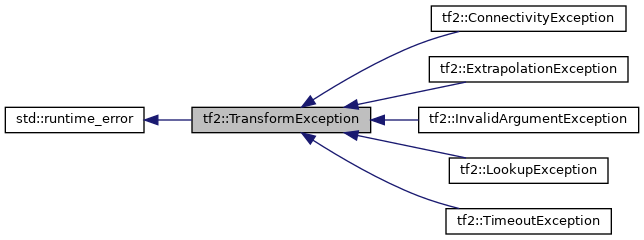
A base class for all tf2 exceptions This inherits from ros::exception which inherits from std::runtime_exception. More...
#include <exceptions.h>
Inheritance diagram for tf2::TransformException:
Collaboration diagram for tf2::TransformException:
Public Member Functions | |
| TransformException (const std::string errorDescription) | |
 Public Member Functions inherited from std::runtime_error Public Member Functions inherited from std::runtime_error | |
| T | runtime_error (T... args) |
| T | what (T... args) |
Detailed Description
A base class for all tf2 exceptions This inherits from ros::exception which inherits from std::runtime_exception.
Constructor & Destructor Documentation
◆ TransformException()
|
inline |
The documentation for this class was generated from the following file:
- include/tf2/exceptions.h
