#include <client.hpp>
Public Member Functions | |
| ClientBase (rclcpp::node_interfaces::NodeBaseInterface *node_base, rclcpp::node_interfaces::NodeGraphInterface::SharedPtr node_graph) | |
| virtual | ~ClientBase () |
| const char * | get_service_name () const |
| std::shared_ptr< rcl_client_t > | get_client_handle () |
| std::shared_ptr< const rcl_client_t > | get_client_handle () const |
| bool | service_is_ready () const |
| template<typename RatioT = std::milli> | |
| bool | wait_for_service (std::chrono::duration< int64_t, RatioT > timeout=std::chrono::duration< int64_t, RatioT >(-1)) |
| virtual std::shared_ptr< void > | create_response ()=0 |
| virtual std::shared_ptr< rmw_request_id_t > | create_request_header ()=0 |
| virtual void | handle_response (std::shared_ptr< rmw_request_id_t > request_header, std::shared_ptr< void > response)=0 |
Protected Member Functions | |
| bool | wait_for_service_nanoseconds (std::chrono::nanoseconds timeout) |
| rcl_node_t * | get_rcl_node_handle () |
| const rcl_node_t * | get_rcl_node_handle () const |
Protected Attributes | |
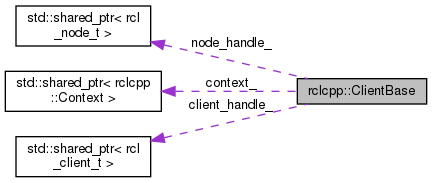
| rclcpp::node_interfaces::NodeGraphInterface::WeakPtr | node_graph_ |
| std::shared_ptr< rcl_node_t > | node_handle_ |
| std::shared_ptr< rclcpp::Context > | context_ |
| std::shared_ptr< rcl_client_t > | client_handle_ |
Constructor & Destructor Documentation
◆ ClientBase()
| rclcpp::ClientBase::ClientBase | ( | rclcpp::node_interfaces::NodeBaseInterface * | node_base, |
| rclcpp::node_interfaces::NodeGraphInterface::SharedPtr | node_graph | ||
| ) |
◆ ~ClientBase()
|
virtual |
Member Function Documentation
◆ get_service_name()
| const char* rclcpp::ClientBase::get_service_name | ( | ) | const |
◆ get_client_handle() [1/2]
| std::shared_ptr<rcl_client_t> rclcpp::ClientBase::get_client_handle | ( | ) |
◆ get_client_handle() [2/2]
| std::shared_ptr<const rcl_client_t> rclcpp::ClientBase::get_client_handle | ( | ) | const |
◆ service_is_ready()
| bool rclcpp::ClientBase::service_is_ready | ( | ) | const |
◆ wait_for_service()
|
inline |
◆ create_response()
|
pure virtual |
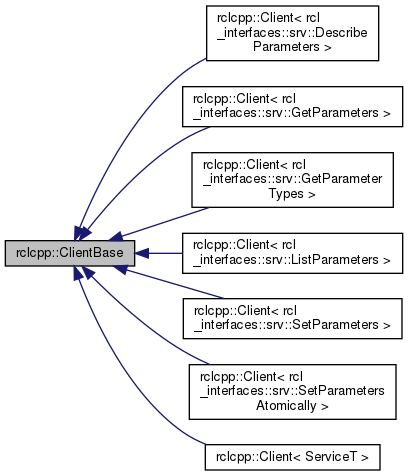
Implemented in rclcpp::Client< ServiceT >, rclcpp::Client< rcl_interfaces::srv::DescribeParameters >, rclcpp::Client< rcl_interfaces::srv::GetParameterTypes >, rclcpp::Client< rcl_interfaces::srv::ListParameters >, rclcpp::Client< rcl_interfaces::srv::SetParameters >, rclcpp::Client< rcl_interfaces::srv::SetParametersAtomically >, and rclcpp::Client< rcl_interfaces::srv::GetParameters >.
◆ create_request_header()
|
pure virtual |
Implemented in rclcpp::Client< ServiceT >, rclcpp::Client< rcl_interfaces::srv::DescribeParameters >, rclcpp::Client< rcl_interfaces::srv::GetParameterTypes >, rclcpp::Client< rcl_interfaces::srv::ListParameters >, rclcpp::Client< rcl_interfaces::srv::SetParameters >, rclcpp::Client< rcl_interfaces::srv::SetParametersAtomically >, and rclcpp::Client< rcl_interfaces::srv::GetParameters >.
◆ handle_response()
|
pure virtual |
Implemented in rclcpp::Client< ServiceT >, rclcpp::Client< rcl_interfaces::srv::DescribeParameters >, rclcpp::Client< rcl_interfaces::srv::GetParameterTypes >, rclcpp::Client< rcl_interfaces::srv::ListParameters >, rclcpp::Client< rcl_interfaces::srv::SetParameters >, rclcpp::Client< rcl_interfaces::srv::SetParametersAtomically >, and rclcpp::Client< rcl_interfaces::srv::GetParameters >.
◆ wait_for_service_nanoseconds()
|
protected |
◆ get_rcl_node_handle() [1/2]
|
protected |
◆ get_rcl_node_handle() [2/2]
|
protected |
Member Data Documentation
◆ node_graph_
|
protected |
◆ node_handle_
|
protected |
◆ context_
|
protected |
◆ client_handle_
|
protected |
The documentation for this class was generated from the following file:
- include/rclcpp/client.hpp
