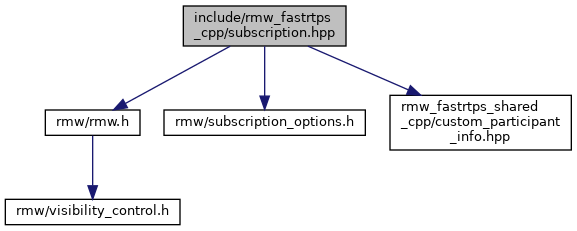
#include "rmw/rmw.h"#include "rmw/subscription_options.h"#include "rmw_fastrtps_shared_cpp/custom_participant_info.hpp"
Include dependency graph for subscription.hpp:
Go to the source code of this file.
Namespaces | |
| rmw_fastrtps_cpp | |
Functions | |
| rmw_subscription_t * | rmw_fastrtps_cpp::create_subscription (const CustomParticipantInfo *participant_info, const rosidl_message_type_support_t *type_supports, const char *topic_name, const rmw_qos_profile_t *qos_policies, const rmw_subscription_options_t *subscription_options, bool keyed, bool create_subscription_listener) |