#include <rcl_action/types.h>#include <action_msgs/msg/goal_status.hpp>#include <action_msgs/msg/goal_info.hpp>#include <climits>#include <functional>#include <string>#include "rclcpp_action/visibility_control.hpp"
Include dependency graph for types.hpp:

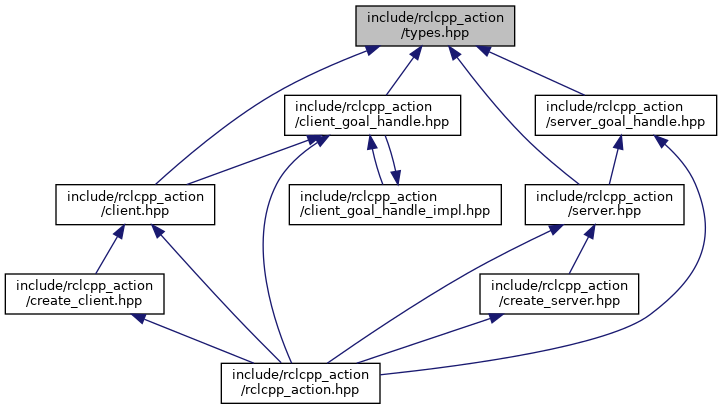
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | std::less< rclcpp_action::GoalUUID > |
| struct | std::hash< rclcpp_action::GoalUUID > |
| Hash a goal id so it can be used as a key in std::unordered_map. More... | |
Namespaces | |
| rclcpp_action | |
| std | |
Typedefs | |
| using | rclcpp_action::GoalUUID = std::array< uint8_t, UUID_SIZE > |
| using | rclcpp_action::GoalStatus = action_msgs::msg::GoalStatus |
| using | rclcpp_action::GoalInfo = action_msgs::msg::GoalInfo |
Functions | |
| RCLCPP_ACTION_PUBLIC std::string | rclcpp_action::to_string (const GoalUUID &goal_id) |
| Convert a goal id to a human readable string. More... | |
| RCLCPP_ACTION_PUBLIC void | rclcpp_action::convert (const GoalUUID &goal_id, rcl_action_goal_info_t *info) |
| RCLCPP_ACTION_PUBLIC void | rclcpp_action::convert (const rcl_action_goal_info_t &info, GoalUUID *goal_id) |
