#include <map>#include <memory>#include <string>#include <vector>#include "rcl_interfaces/msg/list_parameters_result.hpp"#include "rcl_interfaces/msg/parameter_descriptor.hpp"#include "rcl_interfaces/msg/set_parameters_result.hpp"#include "rclcpp/macros.hpp"#include "rclcpp/parameter.hpp"#include "rclcpp/visibility_control.hpp"
Include dependency graph for node_parameters_interface.hpp:

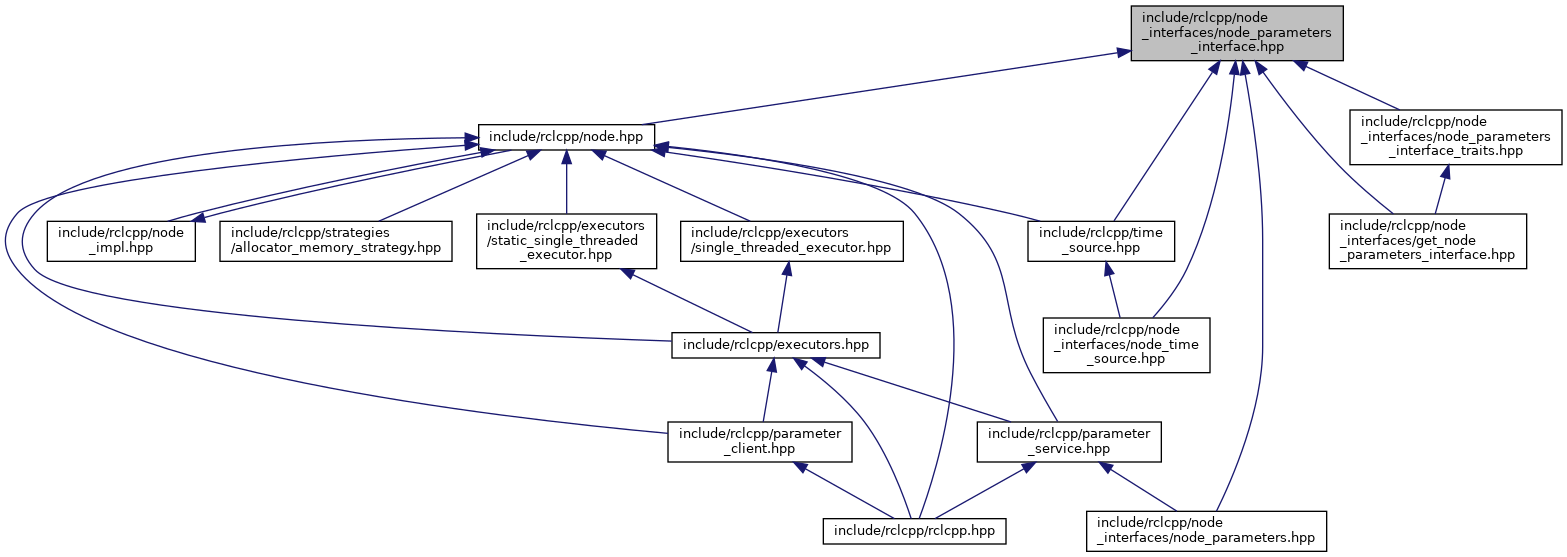
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | rclcpp::node_interfaces::OnSetParametersCallbackHandle |
| class | rclcpp::node_interfaces::NodeParametersInterface |
| Pure virtual interface class for the NodeParameters part of the Node API. More... | |
Namespaces | |
| rclcpp | |
| This header provides the get_node_base_interface() template function. | |
| rclcpp::node_interfaces | |
