#include <subscription_base.hpp>
Public Types | |
| using | IntraProcessManagerWeakPtr = std::weak_ptr< rclcpp::experimental::IntraProcessManager > |
Public Member Functions | |
| SubscriptionBase (rclcpp::node_interfaces::NodeBaseInterface *node_base, const rosidl_message_type_support_t &type_support_handle, const std::string &topic_name, const rcl_subscription_options_t &subscription_options, bool is_serialized=false) | |
| Default constructor. More... | |
| virtual | ~SubscriptionBase () |
| Default destructor. More... | |
| const char * | get_topic_name () const |
| Get the topic that this subscription is subscribed on. More... | |
| std::shared_ptr< rcl_subscription_t > | get_subscription_handle () |
| std::shared_ptr< const rcl_subscription_t > | get_subscription_handle () const |
| const std::vector< std::shared_ptr< rclcpp::QOSEventHandlerBase > > & | get_event_handlers () const |
| Get all the QoS event handlers associated with this subscription. More... | |
| rclcpp::QoS | get_actual_qos () const |
| Get the actual QoS settings, after the defaults have been determined. More... | |
| bool | take_type_erased (void *message_out, rclcpp::MessageInfo &message_info_out) |
| Take the next inter-process message from the subscription as a type erased pointer. More... | |
| bool | take_serialized (rclcpp::SerializedMessage &message_out, rclcpp::MessageInfo &message_info_out) |
| Take the next inter-process message, in its serialized form, from the subscription. More... | |
| virtual std::shared_ptr< void > | create_message ()=0 |
| Borrow a new message. More... | |
| virtual std::shared_ptr< rclcpp::SerializedMessage > | create_serialized_message ()=0 |
| Borrow a new serialized message. More... | |
| virtual void | handle_message (std::shared_ptr< void > &message, const rclcpp::MessageInfo &message_info)=0 |
| Check if we need to handle the message, and execute the callback if we do. More... | |
| virtual void | handle_loaned_message (void *loaned_message, const rclcpp::MessageInfo &message_info)=0 |
| virtual void | return_message (std::shared_ptr< void > &message)=0 |
| Return the message borrowed in create_message. More... | |
| virtual void | return_serialized_message (std::shared_ptr< rclcpp::SerializedMessage > &message)=0 |
| Return the message borrowed in create_serialized_message. More... | |
| const rosidl_message_type_support_t & | get_message_type_support_handle () const |
| bool | is_serialized () const |
| Return if the subscription is serialized. More... | |
| size_t | get_publisher_count () const |
| Get matching publisher count. More... | |
| bool | can_loan_messages () const |
| Check if subscription instance can loan messages. More... | |
| void | setup_intra_process (uint64_t intra_process_subscription_id, IntraProcessManagerWeakPtr weak_ipm) |
| Implemenation detail. More... | |
| rclcpp::Waitable::SharedPtr | get_intra_process_waitable () const |
| Return the waitable for intra-process. More... | |
| bool | exchange_in_use_by_wait_set_state (void *pointer_to_subscription_part, bool in_use_state) |
| Exchange state of whether or not a part of the subscription is used by a wait set. More... | |
 Public Member Functions inherited from std::enable_shared_from_this< SubscriptionBase > Public Member Functions inherited from std::enable_shared_from_this< SubscriptionBase > | |
| T | enable_shared_from_this (T... args) |
| T | operator= (T... args) |
| T | shared_from_this (T... args) |
| T | ~enable_shared_from_this (T... args) |
Protected Member Functions | |
| template<typename EventCallbackT > | |
| void | add_event_handler (const EventCallbackT &callback, const rcl_subscription_event_type_t event_type) |
| void | default_incompatible_qos_callback (QOSRequestedIncompatibleQoSInfo &info) const |
| bool | matches_any_intra_process_publishers (const rmw_gid_t *sender_gid) const |
Detailed Description
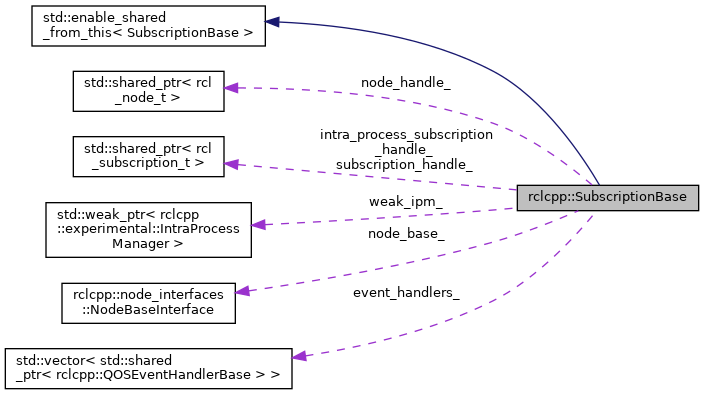
Virtual base class for subscriptions. This pattern allows us to iterate over different template specializations of Subscription, among other things.
Member Typedef Documentation
◆ IntraProcessManagerWeakPtr
| using rclcpp::SubscriptionBase::IntraProcessManagerWeakPtr = std::weak_ptr<rclcpp::experimental::IntraProcessManager> |
Constructor & Destructor Documentation
◆ SubscriptionBase()
| rclcpp::SubscriptionBase::SubscriptionBase | ( | rclcpp::node_interfaces::NodeBaseInterface * | node_base, |
| const rosidl_message_type_support_t & | type_support_handle, | ||
| const std::string & | topic_name, | ||
| const rcl_subscription_options_t & | subscription_options, | ||
| bool | is_serialized = false |
||
| ) |
Default constructor.
- Parameters
-
[in] node_base NodeBaseInterface pointer used in parts of the setup. [in] type_support_handle rosidl type support struct, for the Message type of the topic. [in] topic_name Name of the topic to subscribe to. [in] subscription_options options for the subscription. [in] is_serialized is true if the message will be delivered still serialized
◆ ~SubscriptionBase()
|
virtual |
Default destructor.
Member Function Documentation
◆ get_topic_name()
| const char* rclcpp::SubscriptionBase::get_topic_name | ( | ) | const |
Get the topic that this subscription is subscribed on.
◆ get_subscription_handle() [1/2]
| std::shared_ptr<rcl_subscription_t> rclcpp::SubscriptionBase::get_subscription_handle | ( | ) |
◆ get_subscription_handle() [2/2]
| std::shared_ptr<const rcl_subscription_t> rclcpp::SubscriptionBase::get_subscription_handle | ( | ) | const |
◆ get_event_handlers()
| const std::vector<std::shared_ptr<rclcpp::QOSEventHandlerBase> >& rclcpp::SubscriptionBase::get_event_handlers | ( | ) | const |
◆ get_actual_qos()
| rclcpp::QoS rclcpp::SubscriptionBase::get_actual_qos | ( | ) | const |
Get the actual QoS settings, after the defaults have been determined.
The actual configuration applied when using RMW_QOS_POLICY_*_SYSTEM_DEFAULT can only be resolved after the creation of the publisher, and it depends on the underlying rmw implementation. If the underlying setting in use can't be represented in ROS terms, it will be set to RMW_QOS_POLICY_*_UNKNOWN. May throw runtime_error when an unexpected error occurs.
- Returns
- The actual qos settings.
- Exceptions
-
std::runtime_error if failed to get qos settings
◆ take_type_erased()
| bool rclcpp::SubscriptionBase::take_type_erased | ( | void * | message_out, |
| rclcpp::MessageInfo & | message_info_out | ||
| ) |
Take the next inter-process message from the subscription as a type erased pointer.
- See also
- Subscription::take() for details on how this function works.
The only difference is that it takes a type erased pointer rather than a reference to the exact message type.
This type erased version facilitates using the subscriptions in a type agnostic way using SubscriptionBase::create_message() and SubscriptionBase::handle_message().
- Parameters
-
[out] message_out The type erased message pointer into which take will copy the data. [out] message_info_out The message info for the taken message.
- Returns
- true if data was taken and is valid, otherwise false
- Exceptions
-
any rcl errors from rcl_take,
◆ take_serialized()
| bool rclcpp::SubscriptionBase::take_serialized | ( | rclcpp::SerializedMessage & | message_out, |
| rclcpp::MessageInfo & | message_info_out | ||
| ) |
Take the next inter-process message, in its serialized form, from the subscription.
For now, if data is taken (written) into the message_out and message_info_out then true will be returned. Unlike Subscription::take(), taking data serialized is not possible via intra-process for the time being, so it will not need to de-duplicate data in any case.
- Parameters
-
[out] message_out The serialized message data structure used to store the taken message. [out] message_info_out The message info for the taken message.
- Returns
- true if data was taken and is valid, otherwise false
- Exceptions
-
any rcl errors from rcl_take,
◆ create_message()
|
pure virtual |
Borrow a new message.
- Returns
- Shared pointer to the fresh message.
Implemented in rclcpp::Subscription< CallbackMessageT, AllocatorT, MessageMemoryStrategyT >.
◆ create_serialized_message()
|
pure virtual |
Borrow a new serialized message.
- Returns
- Shared pointer to a rcl_message_serialized_t.
Implemented in rclcpp::Subscription< CallbackMessageT, AllocatorT, MessageMemoryStrategyT >.
◆ handle_message()
|
pure virtual |
Check if we need to handle the message, and execute the callback if we do.
- Parameters
-
[in] message Shared pointer to the message to handle. [in] message_info Metadata associated with this message.
Implemented in rclcpp::Subscription< CallbackMessageT, AllocatorT, MessageMemoryStrategyT >.
◆ handle_loaned_message()
|
pure virtual |
◆ return_message()
|
pure virtual |
Return the message borrowed in create_message.
- Parameters
-
[in] message Shared pointer to the returned message.
Implemented in rclcpp::Subscription< CallbackMessageT, AllocatorT, MessageMemoryStrategyT >.
◆ return_serialized_message()
|
pure virtual |
Return the message borrowed in create_serialized_message.
- Parameters
-
[in] message Shared pointer to the returned message.
Implemented in rclcpp::Subscription< CallbackMessageT, AllocatorT, MessageMemoryStrategyT >.
◆ get_message_type_support_handle()
| const rosidl_message_type_support_t& rclcpp::SubscriptionBase::get_message_type_support_handle | ( | ) | const |
◆ is_serialized()
| bool rclcpp::SubscriptionBase::is_serialized | ( | ) | const |
Return if the subscription is serialized.
- Returns
trueif the subscription is serialized,falseotherwise
◆ get_publisher_count()
| size_t rclcpp::SubscriptionBase::get_publisher_count | ( | ) | const |
Get matching publisher count.
- Returns
- The number of publishers on this topic.
◆ can_loan_messages()
| bool rclcpp::SubscriptionBase::can_loan_messages | ( | ) | const |
Check if subscription instance can loan messages.
Depending on the middleware and the message type, this will return true if the middleware can allocate a ROS message instance.
- Returns
- boolean flag indicating if middleware can loan messages.
◆ setup_intra_process()
| void rclcpp::SubscriptionBase::setup_intra_process | ( | uint64_t | intra_process_subscription_id, |
| IntraProcessManagerWeakPtr | weak_ipm | ||
| ) |
Implemenation detail.
◆ get_intra_process_waitable()
| rclcpp::Waitable::SharedPtr rclcpp::SubscriptionBase::get_intra_process_waitable | ( | ) | const |
Return the waitable for intra-process.
- Returns
- the waitable sharedpointer for intra-process, or nullptr if intra-process is not setup.
- Exceptions
-
std::runtime_error if the intra process manager is destroyed
◆ exchange_in_use_by_wait_set_state()
| bool rclcpp::SubscriptionBase::exchange_in_use_by_wait_set_state | ( | void * | pointer_to_subscription_part, |
| bool | in_use_state | ||
| ) |
Exchange state of whether or not a part of the subscription is used by a wait set.
Used to ensure parts of the subscription are not used with multiple wait sets simultaneously.
- Parameters
-
[in] pointer_to_subscription_part address of a subscription part [in] in_use_state the new state to exchange, true means "now in use", and false means "no longer in use".
- Returns
- the current "in use" state.
- Exceptions
-
std::invalid_argument If pointer_to_subscription_part is nullptr. std::runtime_error If the pointer given is not a pointer to one of the parts of the subscription which can be used with a wait set.
◆ add_event_handler()
|
inlineprotected |
◆ default_incompatible_qos_callback()
|
protected |
◆ matches_any_intra_process_publishers()
|
protected |
Member Data Documentation
◆ node_base_
|
protected |
◆ node_handle_
|
protected |
◆ subscription_handle_
|
protected |
◆ intra_process_subscription_handle_
|
protected |
◆ event_handlers_
|
protected |
◆ use_intra_process_
|
protected |
◆ weak_ipm_
|
protected |
◆ intra_process_subscription_id_
|
protected |
The documentation for this class was generated from the following file:
- include/rclcpp/subscription_base.hpp
