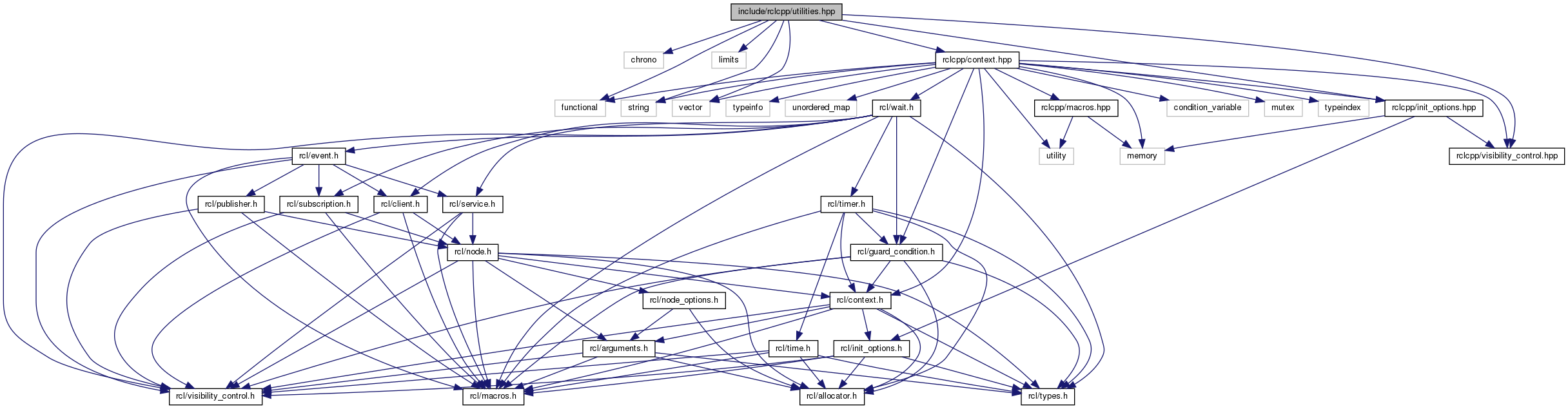
#include <chrono>#include <functional>#include <limits>#include <string>#include <vector>#include "rclcpp/context.hpp"#include "rclcpp/init_options.hpp"#include "rclcpp/visibility_control.hpp"
Include dependency graph for utilities.hpp:
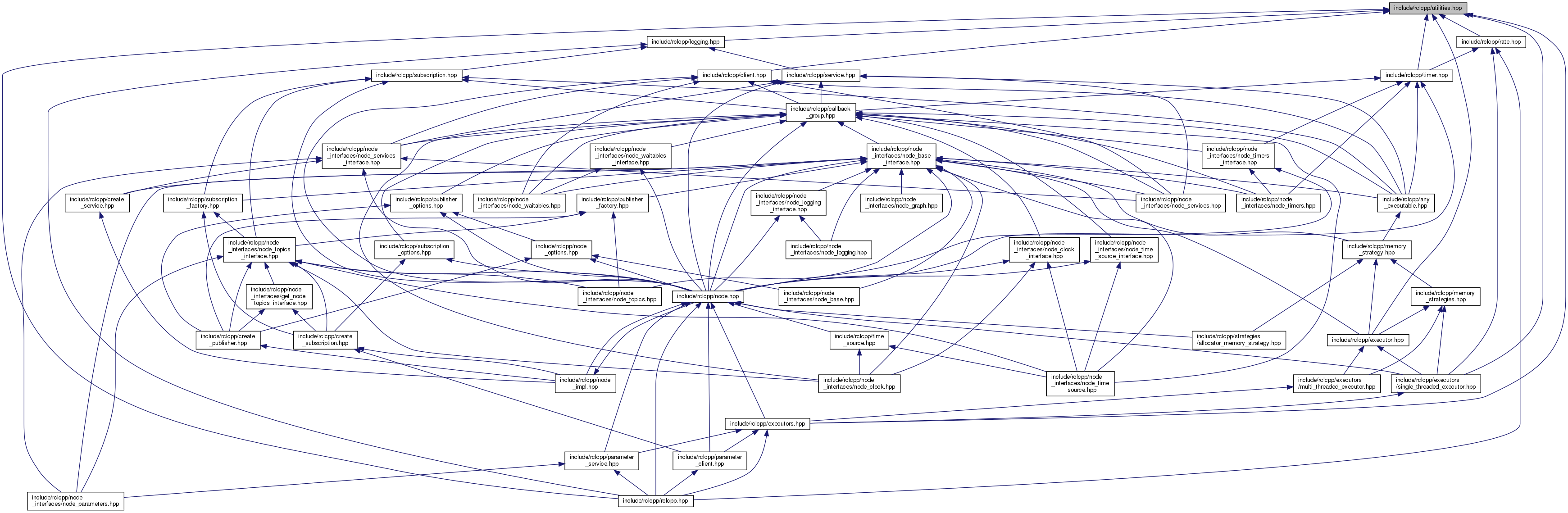
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| rclcpp | |
| This header provides the get_node_topics_interface() template function. | |
Functions | |
| void | rclcpp::init (int argc, char const *const argv[], const InitOptions &init_options=InitOptions()) |
| Initialize communications via the rmw implementation and set up a global signal handler. More... | |
| bool | rclcpp::install_signal_handlers () |
| Install the global signal handler for rclcpp. More... | |
| bool | rclcpp::signal_handlers_installed () |
| Return true if the signal handlers are installed, otherwise false. More... | |
| bool | rclcpp::uninstall_signal_handlers () |
| Uninstall the global signal handler for rclcpp. More... | |
| std::vector< std::string > | rclcpp::init_and_remove_ros_arguments (int argc, char const *const argv[], const InitOptions &init_options=InitOptions()) |
| Initialize communications via the rmw implementation and set up a global signal handler. More... | |
| std::vector< std::string > | rclcpp::remove_ros_arguments (int argc, char const *const argv[]) |
| Remove ROS-specific arguments from argument vector. More... | |
| bool | rclcpp::ok (rclcpp::Context::SharedPtr context=nullptr) |
| Check rclcpp's status. More... | |
| bool | rclcpp::is_initialized (rclcpp::Context::SharedPtr context=nullptr) |
| Return true if init() has already been called for the given context. More... | |
| bool | rclcpp::shutdown (rclcpp::Context::SharedPtr context=nullptr, const std::string &reason="user called rclcpp::shutdown()") |
| Shutdown rclcpp context, invalidating it for derived entities. More... | |
| void | rclcpp::on_shutdown (std::function< void()> callback, rclcpp::Context::SharedPtr context=nullptr) |
| Register a function to be called when shutdown is called on the context. More... | |
| bool | rclcpp::sleep_for (const std::chrono::nanoseconds &nanoseconds, rclcpp::Context::SharedPtr context=nullptr) |
| Use the global condition variable to block for the specified amount of time. More... | |
| template<typename T > | |
| bool | rclcpp::add_will_overflow (const T x, const T y) |
| Safely check if addition will overflow. More... | |
| template<typename T > | |
| bool | rclcpp::add_will_underflow (const T x, const T y) |
| Safely check if addition will underflow. More... | |
| template<typename T > | |
| bool | rclcpp::sub_will_overflow (const T x, const T y) |
| Safely check if subtraction will overflow. More... | |
| template<typename T > | |
| bool | rclcpp::sub_will_underflow (const T x, const T y) |
| Safely check if subtraction will underflow. More... | |
| const char * | rclcpp::get_c_string (const char *string_in) |
| Return the given string. More... | |
| const char * | rclcpp::get_c_string (const std::string &string_in) |
| Return the C string from the given std::string. More... | |
