#include <future>#include <memory>#include "rclcpp/executors/multi_threaded_executor.hpp"#include "rclcpp/executors/single_threaded_executor.hpp"#include "rclcpp/node.hpp"#include "rclcpp/utilities.hpp"#include "rclcpp/visibility_control.hpp"
Include dependency graph for executors.hpp:

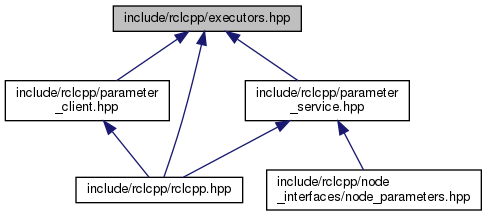
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| rclcpp | |
| This header provides the get_node_topics_interface() template function. | |
| rclcpp::executors | |
Functions | |
| void | rclcpp::spin_some (rclcpp::node_interfaces::NodeBaseInterface::SharedPtr node_ptr) |
| Create a default single-threaded executor and execute any immediately available work. More... | |
| void | rclcpp::spin_some (rclcpp::Node::SharedPtr node_ptr) |
| void | rclcpp::spin (rclcpp::node_interfaces::NodeBaseInterface::SharedPtr node_ptr) |
| Create a default single-threaded executor and spin the specified node. More... | |
| void | rclcpp::spin (rclcpp::Node::SharedPtr node_ptr) |
| template<typename ResponseT , typename TimeRepT = int64_t, typename TimeT = std::milli> | |
| rclcpp::executor::FutureReturnCode | rclcpp::executors::spin_node_until_future_complete (rclcpp::executor::Executor &executor, rclcpp::node_interfaces::NodeBaseInterface::SharedPtr node_ptr, std::shared_future< ResponseT > &future, std::chrono::duration< TimeRepT, TimeT > timeout=std::chrono::duration< TimeRepT, TimeT >(-1)) |
| Spin (blocking) until the future is complete, it times out waiting, or rclcpp is interrupted. More... | |
| template<typename NodeT = rclcpp::Node, typename ResponseT , typename TimeRepT = int64_t, typename TimeT = std::milli> | |
| rclcpp::executor::FutureReturnCode | rclcpp::executors::spin_node_until_future_complete (rclcpp::executor::Executor &executor, std::shared_ptr< NodeT > node_ptr, std::shared_future< ResponseT > &future, std::chrono::duration< TimeRepT, TimeT > timeout=std::chrono::duration< TimeRepT, TimeT >(-1)) |
| template<typename FutureT , typename TimeRepT = int64_t, typename TimeT = std::milli> | |
| rclcpp::executor::FutureReturnCode | rclcpp::spin_until_future_complete (rclcpp::node_interfaces::NodeBaseInterface::SharedPtr node_ptr, std::shared_future< FutureT > &future, std::chrono::duration< TimeRepT, TimeT > timeout=std::chrono::duration< TimeRepT, TimeT >(-1)) |
| template<typename NodeT = rclcpp::Node, typename FutureT , typename TimeRepT = int64_t, typename TimeT = std::milli> | |
| rclcpp::executor::FutureReturnCode | rclcpp::spin_until_future_complete (std::shared_ptr< NodeT > node_ptr, std::shared_future< FutureT > &future, std::chrono::duration< TimeRepT, TimeT > timeout=std::chrono::duration< TimeRepT, TimeT >(-1)) |
