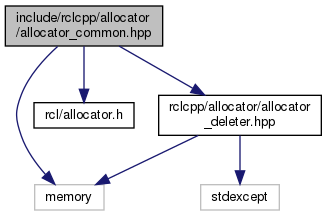
Include dependency graph for allocator_common.hpp:
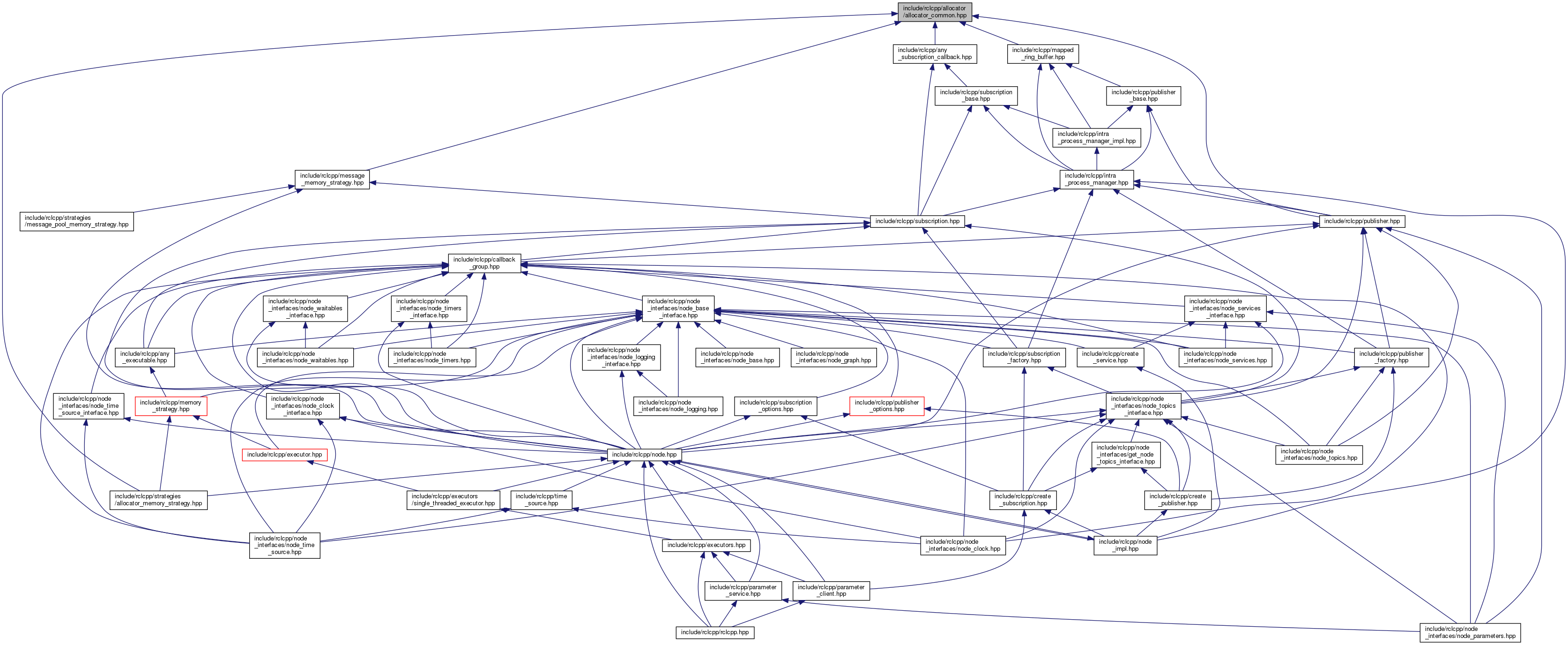
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| rclcpp | |
| This header provides the get_node_topics_interface() template function. | |
| rclcpp::allocator | |
Typedefs | |
| template<typename T , typename Alloc > | |
| using | rclcpp::allocator::AllocRebind = typename std::allocator_traits< Alloc >::template rebind_traits< T > |
Functions | |
| template<typename Alloc > | |
| void * | rclcpp::allocator::retyped_allocate (size_t size, void *untyped_allocator) |
| template<typename T , typename Alloc > | |
| void | rclcpp::allocator::retyped_deallocate (void *untyped_pointer, void *untyped_allocator) |
| template<typename T , typename Alloc > | |
| void * | rclcpp::allocator::retyped_reallocate (void *untyped_pointer, size_t size, void *untyped_allocator) |
| template<typename T , typename Alloc , typename std::enable_if<!std::is_same< Alloc, std::allocator< void >>::value >::type * = nullptr> | |
| rcl_allocator_t | rclcpp::allocator::get_rcl_allocator (Alloc &allocator) |
