#include <string>#include "rclcpp/duration.hpp"#include "rclcpp/exceptions.hpp"#include "rclcpp/visibility_control.hpp"#include "rcl/logging_rosout.h"#include "rmw/incompatible_qos_events_statuses.h"#include "rmw/qos_profiles.h"#include "rmw/types.h"
Include dependency graph for qos.hpp:

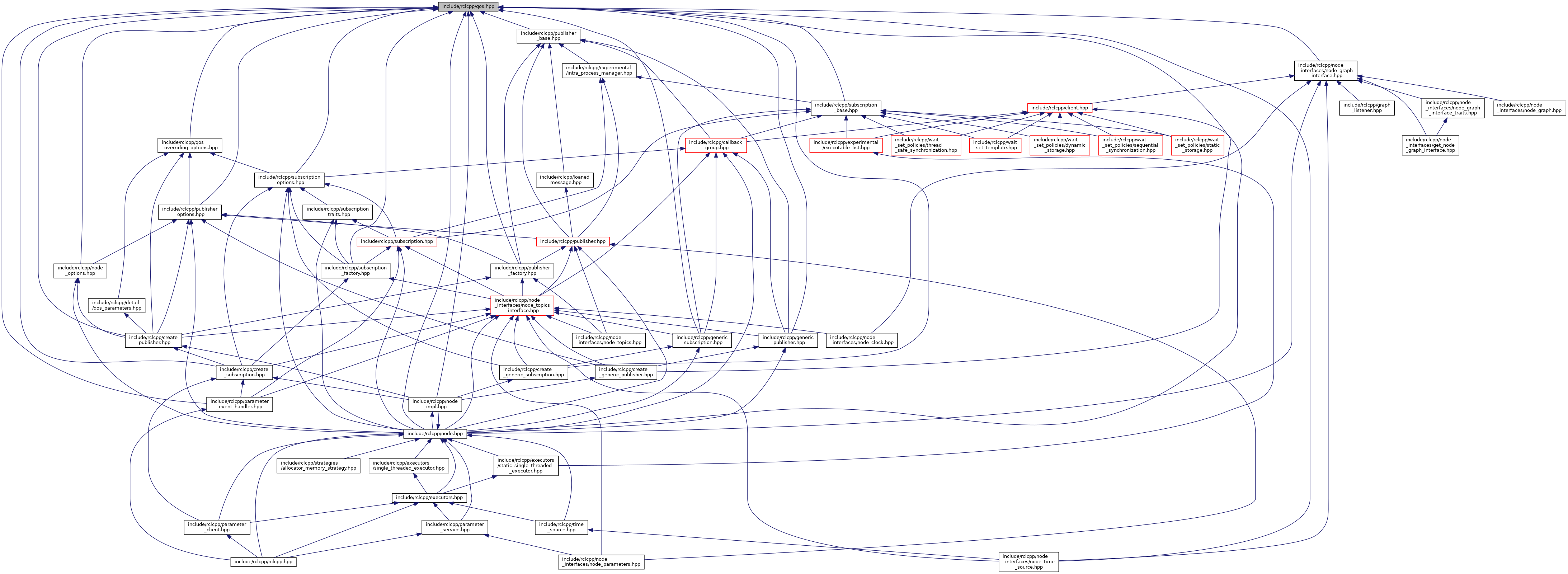
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | rclcpp::QoSInitialization |
| QoS initialization values, cannot be created directly, use KeepAll or KeepLast instead. More... | |
| struct | rclcpp::KeepAll |
| Use to initialize the QoS with the keep_all history setting. More... | |
| struct | rclcpp::KeepLast |
| Use to initialize the QoS with the keep_last history setting and the given depth. More... | |
| class | rclcpp::QoS |
| Encapsulation of Quality of Service settings. More... | |
| struct | rclcpp::QoSCheckCompatibleResult |
| Result type for checking QoS compatibility. More... | |
| class | rclcpp::ClockQoS |
| class | rclcpp::SensorDataQoS |
| class | rclcpp::ParametersQoS |
| class | rclcpp::ServicesQoS |
| class | rclcpp::ParameterEventsQoS |
| class | rclcpp::RosoutQoS |
| class | rclcpp::SystemDefaultsQoS |
Namespaces | |
| rclcpp | |
| This header provides the get_node_base_interface() template function. | |
Enumerations | |
| enum | rclcpp::HistoryPolicy { rclcpp::HistoryPolicy::KeepLast = RMW_QOS_POLICY_HISTORY_KEEP_LAST, rclcpp::HistoryPolicy::KeepAll = RMW_QOS_POLICY_HISTORY_KEEP_ALL, rclcpp::HistoryPolicy::SystemDefault = RMW_QOS_POLICY_HISTORY_SYSTEM_DEFAULT, rclcpp::HistoryPolicy::Unknown = RMW_QOS_POLICY_HISTORY_UNKNOWN } |
| enum | rclcpp::ReliabilityPolicy { rclcpp::ReliabilityPolicy::BestEffort = RMW_QOS_POLICY_RELIABILITY_BEST_EFFORT, rclcpp::ReliabilityPolicy::Reliable = RMW_QOS_POLICY_RELIABILITY_RELIABLE, rclcpp::ReliabilityPolicy::SystemDefault = RMW_QOS_POLICY_RELIABILITY_SYSTEM_DEFAULT, rclcpp::ReliabilityPolicy::Unknown = RMW_QOS_POLICY_RELIABILITY_UNKNOWN } |
| enum | rclcpp::DurabilityPolicy { rclcpp::DurabilityPolicy::Volatile = RMW_QOS_POLICY_DURABILITY_VOLATILE, rclcpp::DurabilityPolicy::TransientLocal = RMW_QOS_POLICY_DURABILITY_TRANSIENT_LOCAL, rclcpp::DurabilityPolicy::SystemDefault = RMW_QOS_POLICY_DURABILITY_SYSTEM_DEFAULT, rclcpp::DurabilityPolicy::Unknown = RMW_QOS_POLICY_DURABILITY_UNKNOWN } |
| enum | rclcpp::LivelinessPolicy { rclcpp::LivelinessPolicy::Automatic = RMW_QOS_POLICY_LIVELINESS_AUTOMATIC, rclcpp::LivelinessPolicy::ManualByTopic = RMW_QOS_POLICY_LIVELINESS_MANUAL_BY_TOPIC, rclcpp::LivelinessPolicy::SystemDefault = RMW_QOS_POLICY_LIVELINESS_SYSTEM_DEFAULT, rclcpp::LivelinessPolicy::Unknown = RMW_QOS_POLICY_LIVELINESS_UNKNOWN } |
| enum | rclcpp::QoSCompatibility { rclcpp::QoSCompatibility::Ok = RMW_QOS_COMPATIBILITY_OK, rclcpp::QoSCompatibility::Warning = RMW_QOS_COMPATIBILITY_WARNING, rclcpp::QoSCompatibility::Error = RMW_QOS_COMPATIBILITY_ERROR } |
Functions | |
| std::string | rclcpp::qos_policy_name_from_kind (rmw_qos_policy_kind_t policy_kind) |
| bool | rclcpp::operator== (const QoS &left, const QoS &right) |
| Check if two QoS profiles are exactly equal in all policy values. More... | |
| bool | rclcpp::operator!= (const QoS &left, const QoS &right) |
| QoSCheckCompatibleResult | rclcpp::qos_check_compatible (const QoS &publisher_qos, const QoS &subscription_qos) |
| Check if two QoS profiles are compatible. More... | |
