It contains the communication interfac with the ROS world. More...
#include <data_types.h>
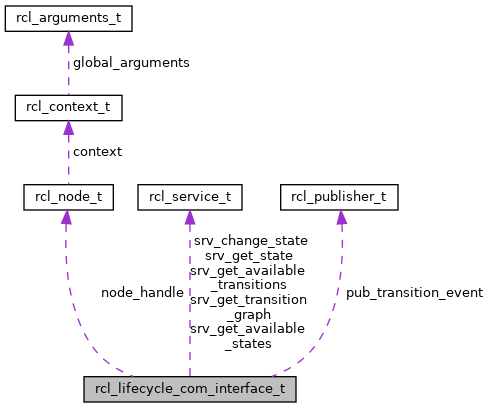
Collaboration diagram for rcl_lifecycle_com_interface_t:
Public Attributes | |
| rcl_node_t * | node_handle |
| Handle to the node used to create the publisher and the services. | |
| rcl_publisher_t | pub_transition_event |
| Event used to publish the transitions. | |
| rcl_service_t | srv_change_state |
| Service that allows to trigger changes on the state. | |
| rcl_service_t | srv_get_state |
| Service that allows to get the current state. | |
| rcl_service_t | srv_get_available_states |
| Service that allows to get the available states. | |
| rcl_service_t | srv_get_available_transitions |
| Service that allows to get the available transitions. | |
| rcl_service_t | srv_get_transition_graph |
| Service that allows to get transitions from the graph. | |
Detailed Description
It contains the communication interfac with the ROS world.
The documentation for this struct was generated from the following file:
- include/rcl_lifecycle/data_types.h
