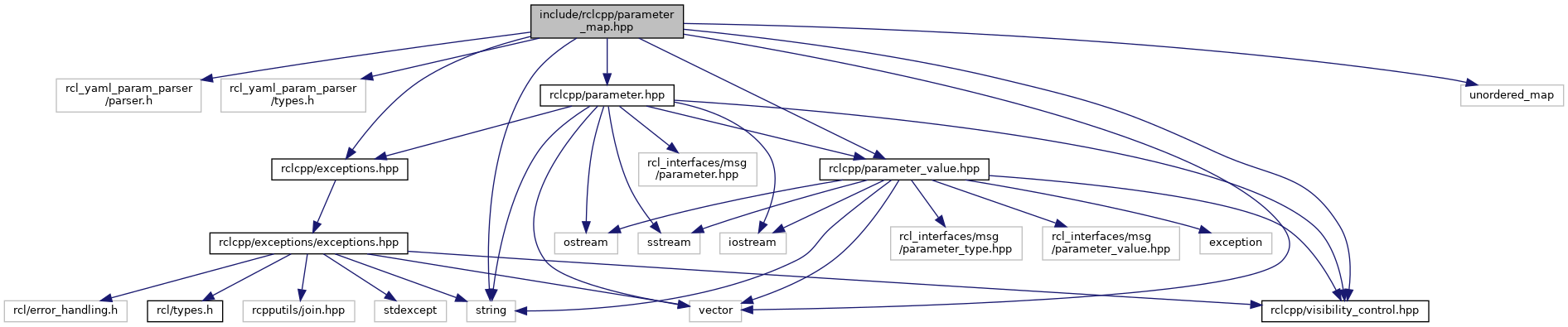
#include <rcl_yaml_param_parser/parser.h>#include <rcl_yaml_param_parser/types.h>#include <string>#include <unordered_map>#include <vector>#include "rclcpp/exceptions.hpp"#include "rclcpp/parameter.hpp"#include "rclcpp/parameter_value.hpp"#include "rclcpp/visibility_control.hpp"
Include dependency graph for parameter_map.hpp:
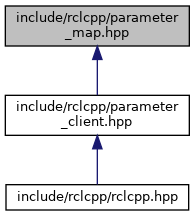
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| rclcpp | |
| This header provides the get_node_base_interface() template function. | |
Typedefs | |
| using | rclcpp::ParameterMap = std::unordered_map< std::string, std::vector< Parameter > > |
| A map of fully qualified node names to a list of parameters. More... | |
Functions | |
| ParameterMap | rclcpp::parameter_map_from (const rcl_params_t *const c_params) |
| ParameterValue | rclcpp::parameter_value_from (const rcl_variant_t *const c_value) |
| ParameterMap | rclcpp::parameter_map_from_yaml_file (const std::string &yaml_filename) |
