#include <memory>#include <string>#include <utility>#include "rclcpp/generic_publisher.hpp"#include "rclcpp/node_interfaces/node_topics_interface.hpp"#include "rclcpp/publisher_options.hpp"#include "rclcpp/qos.hpp"#include "rclcpp/typesupport_helpers.hpp"
Include dependency graph for create_generic_publisher.hpp:

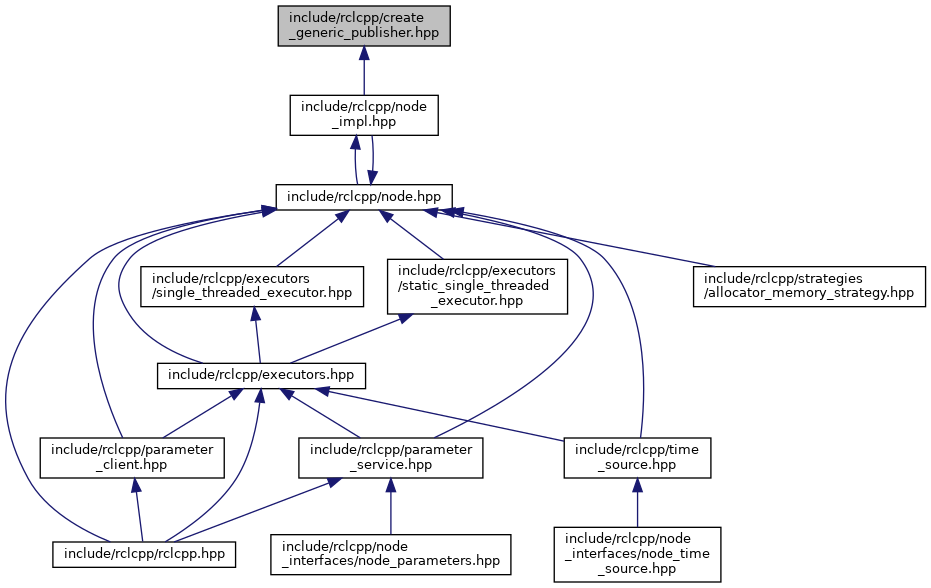
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| rclcpp | |
| This header provides the get_node_base_interface() template function. | |
Functions | |
| template<typename AllocatorT = std::allocator<void>> | |
| std::shared_ptr< GenericPublisher > | rclcpp::create_generic_publisher (rclcpp::node_interfaces::NodeTopicsInterface::SharedPtr topics_interface, const std::string &topic_name, const std::string &topic_type, const rclcpp::QoS &qos, const rclcpp::PublisherOptionsWithAllocator< AllocatorT > &options=(rclcpp::PublisherOptionsWithAllocator< AllocatorT >())) |
| Create and return a GenericPublisher. More... | |
