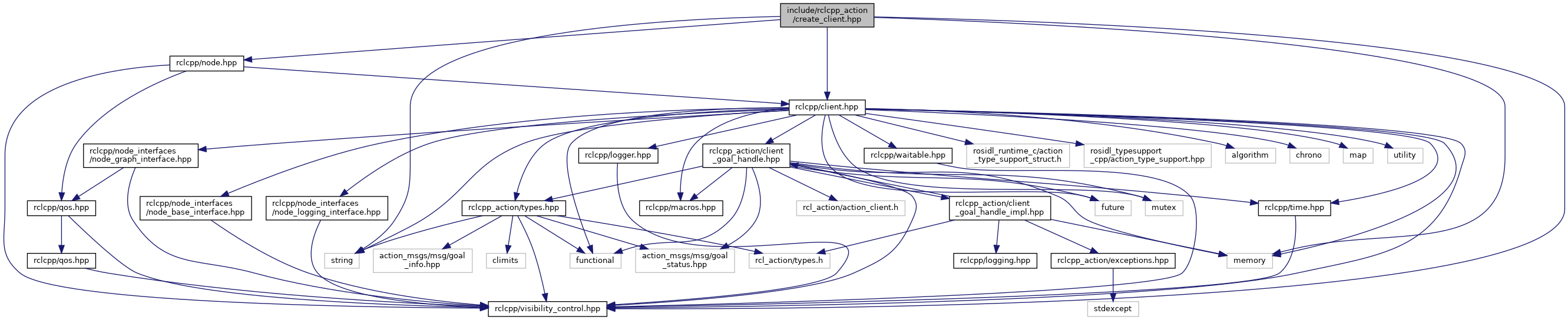
#include <rclcpp/node.hpp>#include <memory>#include <string>#include "rclcpp_action/client.hpp"#include "rclcpp_action/visibility_control.hpp"
Include dependency graph for create_client.hpp:
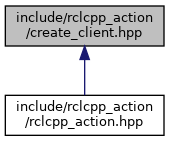
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| rclcpp_action | |
Functions | |
| template<typename ActionT > | |
| Client< ActionT >::SharedPtr | rclcpp_action::create_client (rclcpp::node_interfaces::NodeBaseInterface::SharedPtr node_base_interface, rclcpp::node_interfaces::NodeGraphInterface::SharedPtr node_graph_interface, rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr node_logging_interface, rclcpp::node_interfaces::NodeWaitablesInterface::SharedPtr node_waitables_interface, const std::string &name, rclcpp::CallbackGroup::SharedPtr group=nullptr) |
| Create an action client. More... | |
| template<typename ActionT , typename NodeT > | |
| Client< ActionT >::SharedPtr | rclcpp_action::create_client (NodeT node, const std::string &name, rclcpp::CallbackGroup::SharedPtr group=nullptr) |
| Create an action client. More... | |
