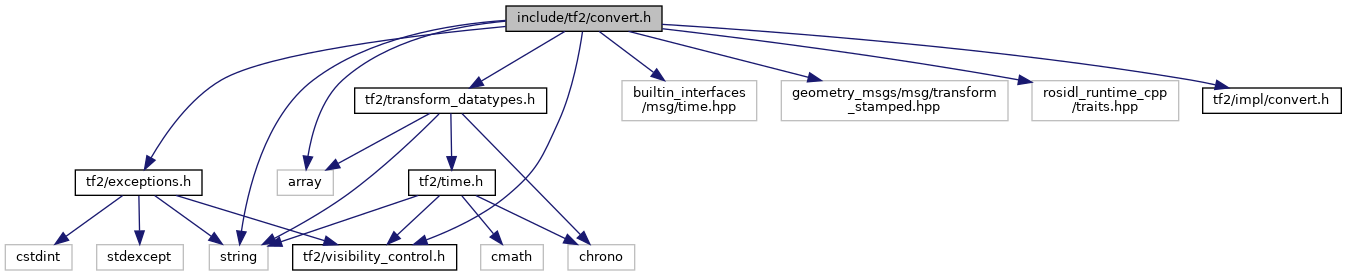
#include <array>#include <string>#include "builtin_interfaces/msg/time.hpp"#include "geometry_msgs/msg/transform_stamped.hpp"#include "rosidl_runtime_cpp/traits.hpp"#include "tf2/exceptions.h"#include "tf2/impl/convert.h"#include "tf2/transform_datatypes.h"#include "tf2/visibility_control.h"
Include dependency graph for convert.h:
Go to the source code of this file.
Namespaces | |
| tf2 | |
Functions | |
| template<class T > | |
| void | tf2::doTransform (const T &data_in, T &data_out, const geometry_msgs::msg::TransformStamped &transform) |
| The templated function expected to be able to do a transform. More... | |
| template<class T > | |
| tf2::TimePoint | tf2::getTimestamp (const T &t) |
| Get the timestamp from data. More... | |
| template<class T > | |
| std::string | tf2::getFrameId (const T &t) |
| Get the frame_id from data. More... | |
| template<class T > | |
| std::array< std::array< double, 6 >, 6 > | tf2::getCovarianceMatrix (const T &t) |
| Get the covariance matrix from data. More... | |
| template<class P > | |
| tf2::TimePoint | tf2::getTimestamp (const tf2::Stamped< P > &t) |
| Get the frame_id from data. More... | |
| template<class P > | |
| std::string | tf2::getFrameId (const tf2::Stamped< P > &t) |
| Get the frame_id from data. More... | |
| template<class P > | |
| std::array< std::array< double, 6 >, 6 > | tf2::getCovarianceMatrix (const tf2::WithCovarianceStamped< P > &t) |
| Get the covariance matrix from data. More... | |
| template<typename A , typename B > | |
| B | tf2::toMsg (const A &a) |
| Function that converts from one type to a ROS message type. It has to be implemented by each data type in tf2_* (except ROS messages) as it is used in the "convert" function. More... | |
| template<typename A , typename B > | |
| void | tf2::fromMsg (const A &, B &b) |
| Function that converts from a ROS message type to another type. It has to be implemented by each data type in tf2_* (except ROS messages) as it is used in the "convert" function. More... | |
| template<class A , class B > | |
| void | tf2::convert (const A &a, B &b) |
| Function that converts any type to any type (messages or not). Matching toMsg and from Msg conversion functions need to exist. If they don't exist or do not apply (for example, if your two classes are ROS messages), just write a specialization of the function. More... | |
| template<class A > | |
| void | tf2::convert (const A &a1, A &a2) |
| std::array< std::array< double, 6 >, 6 > | tf2::covarianceRowMajorToNested (const std::array< double, 36 > &row_major) |
| Function that converts from a row-major representation of a 6x6 covariance matrix to a nested array representation. More... | |
| std::array< double, 36 > | tf2::covarianceNestedToRowMajor (const std::array< std::array< double, 6 >, 6 > &nested_array) |
| Function that converts from a nested array representation of a 6x6 covariance matrix to a row-major representation. More... | |
