#include <rclcpp/rclcpp.hpp>#include <tf2_ros/visibility_control.h>#include <tf2/transform_datatypes.h>#include <tf2/exceptions.h>#include <geometry_msgs/msg/transform_stamped.hpp>#include <sstream>#include <tf2/convert.h>
Include dependency graph for buffer_interface.h:

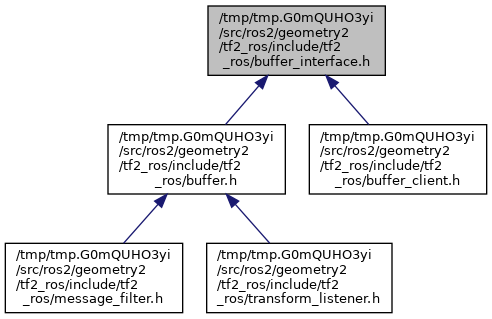
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | tf2_ros::BufferInterface |
| Abstract interface for wrapping tf2::BufferCoreInterface in a ROS-based API. Implementations include tf2_ros::Buffer and tf2_ros::BufferClient. More... | |
Namespaces | |
| tf2_ros | |
Functions | |
| builtin_interfaces::msg::Time | tf2_ros::toMsg (const tf2::TimePoint &t) |
| tf2::TimePoint | tf2_ros::fromMsg (const builtin_interfaces::msg::Time &time_msg) |
| builtin_interfaces::msg::Duration | tf2_ros::toMsg (const tf2::Duration &t) |
| tf2::Duration | tf2_ros::fromMsg (const builtin_interfaces::msg::Duration &duration_msg) |
| double | tf2_ros::timeToSec (const builtin_interfaces::msg::Time &time_msg) |
| tf2::TimePoint | tf2_ros::fromRclcpp (const rclcpp::Time &time) |
| rclcpp::Time | tf2_ros::toRclcpp (const tf2::TimePoint &time) |
| tf2::Duration | tf2_ros::fromRclcpp (const rclcpp::Duration &duration) |
| rclcpp::Duration | tf2_ros::toRclcpp (const tf2::Duration &duration) |
