#include <rmw/error_handling.h>#include <rmw/rmw.h>#include <chrono>#include <functional>#include <iostream>#include <memory>#include <sstream>#include <string>#include <utility>#include "rcl/error_handling.h"#include "rcl/subscription.h"#include "rclcpp/any_subscription_callback.hpp"#include "rclcpp/detail/resolve_use_intra_process.hpp"#include "rclcpp/detail/resolve_intra_process_buffer_type.hpp"#include "rclcpp/exceptions.hpp"#include "rclcpp/expand_topic_or_service_name.hpp"#include "rclcpp/experimental/intra_process_manager.hpp"#include "rclcpp/experimental/subscription_intra_process.hpp"#include "rclcpp/logging.hpp"#include "rclcpp/macros.hpp"#include "rclcpp/message_info.hpp"#include "rclcpp/message_memory_strategy.hpp"#include "rclcpp/node_interfaces/node_base_interface.hpp"#include "rclcpp/subscription_base.hpp"#include "rclcpp/subscription_options.hpp"#include "rclcpp/subscription_traits.hpp"#include "rclcpp/type_support_decl.hpp"#include "rclcpp/visibility_control.hpp"#include "rclcpp/waitable.hpp"#include "rclcpp/topic_statistics/subscription_topic_statistics.hpp"#include "tracetools/tracetools.h"
Include dependency graph for subscription.hpp:

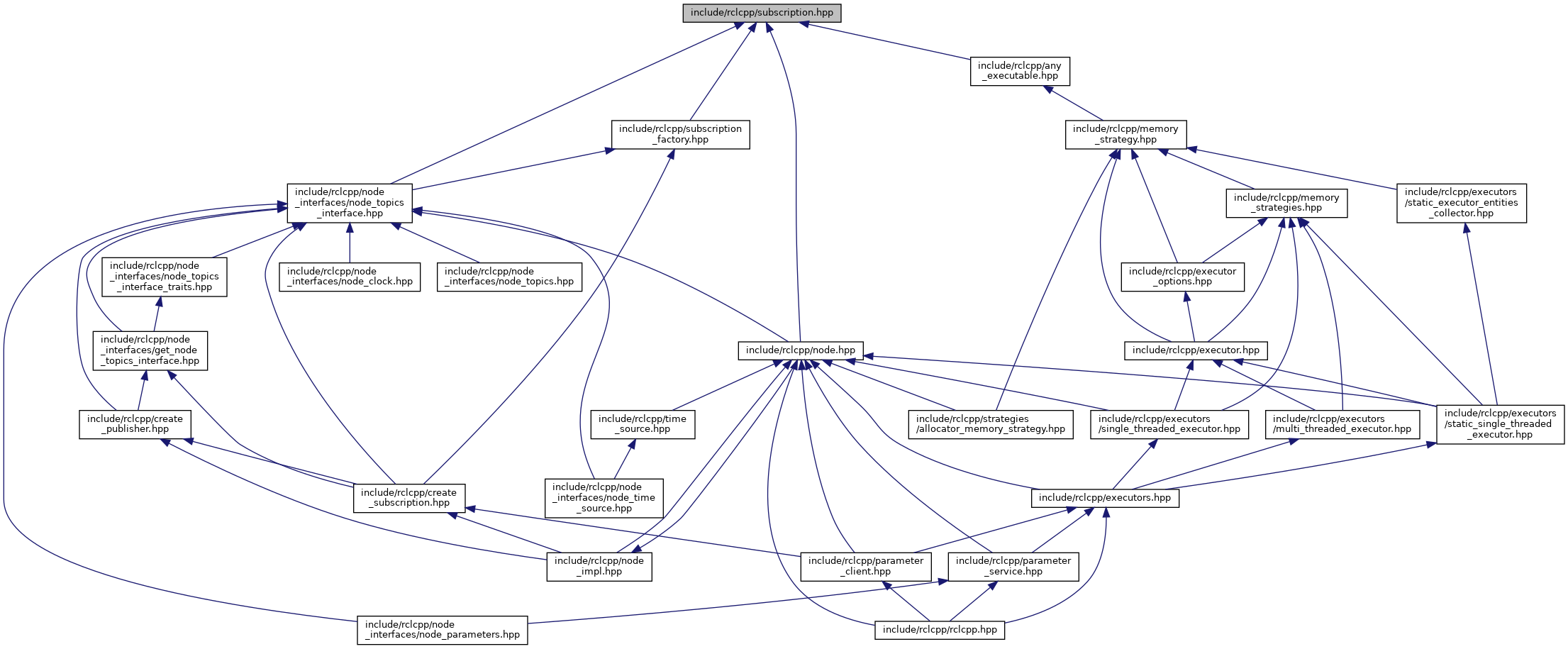
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | rclcpp::Subscription< CallbackMessageT, AllocatorT, MessageMemoryStrategyT > |
| Subscription implementation, templated on the type of message this subscription receives. More... | |
Namespaces | |
| rclcpp | |
| This header provides the get_node_base_interface() template function. | |
| rclcpp::node_interfaces | |
