#include <callback_group.hpp>
|
| void | add_publisher (const rclcpp::PublisherBase::SharedPtr publisher_ptr) |
| |
| void | add_subscription (const rclcpp::SubscriptionBase::SharedPtr subscription_ptr) |
| |
| void | add_timer (const rclcpp::TimerBase::SharedPtr timer_ptr) |
| |
| void | add_service (const rclcpp::ServiceBase::SharedPtr service_ptr) |
| |
| void | add_client (const rclcpp::ClientBase::SharedPtr client_ptr) |
| |
| void | add_waitable (const rclcpp::Waitable::SharedPtr waitable_ptr) |
| |
| void | remove_waitable (const rclcpp::Waitable::SharedPtr waitable_ptr) noexcept |
| |
◆ CallbackGroup()
◆ find_subscription_ptrs_if()
template<typename Function >
| rclcpp::SubscriptionBase::SharedPtr rclcpp::CallbackGroup::find_subscription_ptrs_if |
( |
Function |
func | ) |
const |
|
inline |
◆ find_timer_ptrs_if()
template<typename Function >
| rclcpp::TimerBase::SharedPtr rclcpp::CallbackGroup::find_timer_ptrs_if |
( |
Function |
func | ) |
const |
|
inline |
◆ find_service_ptrs_if()
template<typename Function >
| rclcpp::ServiceBase::SharedPtr rclcpp::CallbackGroup::find_service_ptrs_if |
( |
Function |
func | ) |
const |
|
inline |
◆ find_client_ptrs_if()
template<typename Function >
| rclcpp::ClientBase::SharedPtr rclcpp::CallbackGroup::find_client_ptrs_if |
( |
Function |
func | ) |
const |
|
inline |
◆ find_waitable_ptrs_if()
template<typename Function >
| rclcpp::Waitable::SharedPtr rclcpp::CallbackGroup::find_waitable_ptrs_if |
( |
Function |
func | ) |
const |
|
inline |
◆ can_be_taken_from()
| std::atomic_bool& rclcpp::CallbackGroup::can_be_taken_from |
( |
| ) |
|
◆ type()
◆ add_publisher()
| void rclcpp::CallbackGroup::add_publisher |
( |
const rclcpp::PublisherBase::SharedPtr |
publisher_ptr | ) |
|
|
protected |
◆ add_subscription()
| void rclcpp::CallbackGroup::add_subscription |
( |
const rclcpp::SubscriptionBase::SharedPtr |
subscription_ptr | ) |
|
|
protected |
◆ add_timer()
| void rclcpp::CallbackGroup::add_timer |
( |
const rclcpp::TimerBase::SharedPtr |
timer_ptr | ) |
|
|
protected |
◆ add_service()
| void rclcpp::CallbackGroup::add_service |
( |
const rclcpp::ServiceBase::SharedPtr |
service_ptr | ) |
|
|
protected |
◆ add_client()
| void rclcpp::CallbackGroup::add_client |
( |
const rclcpp::ClientBase::SharedPtr |
client_ptr | ) |
|
|
protected |
◆ add_waitable()
| void rclcpp::CallbackGroup::add_waitable |
( |
const rclcpp::Waitable::SharedPtr |
waitable_ptr | ) |
|
|
protected |
◆ remove_waitable()
| void rclcpp::CallbackGroup::remove_waitable |
( |
const rclcpp::Waitable::SharedPtr |
waitable_ptr | ) |
|
|
protectednoexcept |
◆ rclcpp::node_interfaces::NodeServices
◆ rclcpp::node_interfaces::NodeTimers
◆ rclcpp::node_interfaces::NodeTopics
◆ rclcpp::node_interfaces::NodeWaitables
◆ type_
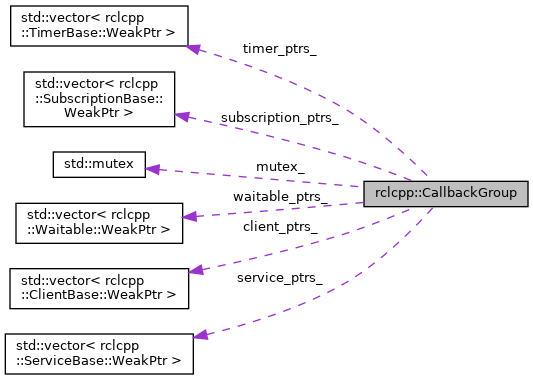
◆ mutex_
◆ subscription_ptrs_
| std::vector<rclcpp::SubscriptionBase::WeakPtr> rclcpp::CallbackGroup::subscription_ptrs_ |
|
protected |
◆ timer_ptrs_
| std::vector<rclcpp::TimerBase::WeakPtr> rclcpp::CallbackGroup::timer_ptrs_ |
|
protected |
◆ service_ptrs_
| std::vector<rclcpp::ServiceBase::WeakPtr> rclcpp::CallbackGroup::service_ptrs_ |
|
protected |
◆ client_ptrs_
| std::vector<rclcpp::ClientBase::WeakPtr> rclcpp::CallbackGroup::client_ptrs_ |
|
protected |
◆ waitable_ptrs_
| std::vector<rclcpp::Waitable::WeakPtr> rclcpp::CallbackGroup::waitable_ptrs_ |
|
protected |
◆ can_be_taken_from_
| std::atomic_bool rclcpp::CallbackGroup::can_be_taken_from_ |
|
protected |
The documentation for this class was generated from the following file: